
|
| |
|
|
Главная » Книги и журналы 1 2 3 4 5 6 7 ... 16 пропорциональна частоте сигнала) и на вихревые токи в сердечниках и металлических конструкциях головок (величина потерь пропорциональна квадрату частоты сигнала). Частотные потери начинают ощущаться в области средних звуковых частот и с увеличением частоты растут на величину 0,5 дБ/октаву. В диапазоне частот до 20 кГц частотные потери магнитных головок с металличе- 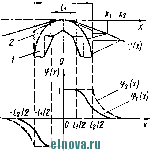 -го -г5 -30 -35
0,1 0,2 0,i 25 50 100 250 f,ru Рис. 2.3. Виды воспроизводящих головок с сердечниками параболической (1) и прямоугольной (2) форм и соответствующие им формы кривых функции потокосцепления ф (х) и волновых искажений в области низких частот и () Р скорости магнитного носителя Vo-J6,2 см/с скими сердечниками обычно не превосходят 2...5 дБ, асферритовы-ми - 0,5... 1 дБ. Однако в широкополосной аппаратуре магнитной записи на частотах свыше 0,1 МГц частотные потери нередко становятся в тракте преобладающими. Значительную неравномерность АЧХ вызывают также конструктивные дефекты и технологические факторы изготовления магнитных головок [14]. Широкополосность. Отношение верхней граничной частоты полосы пропускания к нижней для ТМЗВ обычно превышает 10. В связи с ши-рокополосностью ТМЗВ еще большее значение приобретают неравномерности его АЧХ и ФЧХ. Частотно-зависимая нелинейность. Зависимость величины остаточного магнитного потока носителя Ф;. от тока записи h и определяющаяся ею амплитудная характеристика ТМЗВ нелинейны (рис. 2.4, кривая 1, /вЧШ < /вЧП2 < /вЧПЗ (оптимум) < /вЧП4). Для линеаризации амплитудной характеристики ТМЗВ применяют высокочастотное подмагничивание (ВЧП). ВЧП позволяет уменьшить флуктуации сигнала, возникающие из-за нестабильности значения зазора между головкой и носителем, симметрирует форму отклика воспроизведенного сигнала на перепад тока в головке записи. По мере увеличения тока ВЧП линеаризуется нижний перегиб и возрастает средняя крутизна амплитудной характеристики (т. е. 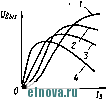 Рис. 2.4. Линеаризация ТМЗВ с помощью ВЧП чувствительность записи). Одновременно уменьшается линейный участок характеристики (рис. 2.4, кривые 2-4). Этот процеес начинается с коротких длин волн и при увеличении тока ВЧП распространяется на длинные волны сигнала записи. Поэтому с помощью ВЧП невозможно добиться полной линеаризации ТМЗВ в широком диапазоне частот. Оптимальный для среднечастотного диа- пазона ток ВЧП оказывается недостаточным для низких частот и слишком большим для высоких. Значение тока ВЧП выбирают, исследовав записи сигналов на средних частотах при разных токах подмагничивания. Обычно т гов
i г Ii/h.HOM с гоо о
8 1о,КГц * 5 д Рис. 2.5. Амплитудные (а) и амплитудно-частотные харак1еристики ТМЗВ по магнитному потоку (б) устанавливают значение тока ВЧП на 10...20 % больше того, которое соответствует максимуму отдачи на средней частоте. На рис. 2.5, а показаны экспериментальные амплитудные характеристики ТМЗВ, полученные в результате записи гармонических сигналов разных частот и перенормированные в значениях остаточного магнитного потока в носителе Ф™. В качестве носителя использовалась магнитная лента типа И4406, протягиваемая со скоростью 9,53 см/с. На рис. 2.5, б изображено семейство АЧХ ТМЗВ для разных уровней записи, полученное перестройкой данных рис. 2.5, а при четырех фиксированных значениях тока записи. Из рис. 2.5, б видно, что ход АЧХ существенно зависит от уровня записи и тем равномернее, чем меньше этот уровень. Поэтому при использовании прямой магнитной записи-воспроизведения нельзя добиться равномерной АЧХ в широком диапазоне уровней записи. Графики, показанные на рис. 2.5, соответствуют воспроизведению сигналограммы потокочувствительными головками, отдача которых пропорциональна Фв (х). Для отображения индукционного воспроизведения необходимо значения ординат на этих графиках умножить на нормированную частоту /д. Можно построить характеристические поверхности передачи сигнала в потокочувст-вительном и индукционном ТМЗВ (рис. 2.6). Одно из ортогональных сечений характеристической поверхности передачи в координатах (Ф^, /) или {U, f) дает АЧХ при выбранном уровне записи, 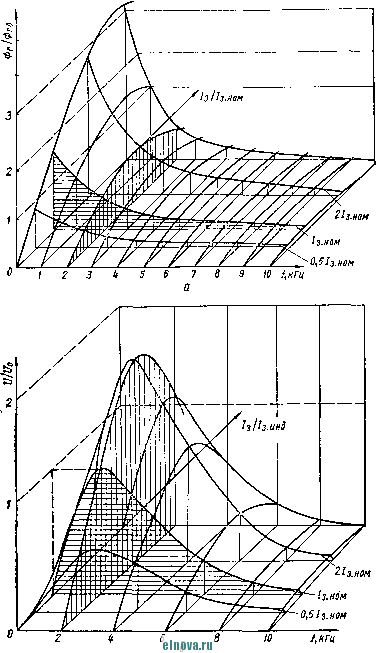 Рис. 2.6. Характеристическая поверхность передачи сигналов потокочув-ствительным (а) и индукционным (б) ТМЗВ (v = 9,53 см/с) а другое - (Ф,., /) или {U, [) - амплитулнуо характеристику при выбранной частоте. При цифровой магнитной записи используется прямоугольная форма сигналов. В колебательном частотном спектре таких сигна -лов достаточно выражены три гармоники максимальной частоты повторения импульсов /змакс Для устранения влияния биений при записи-воспроизведении цифровых сигналов частота ВЧП должна выбираться из условия /вчп =(10...20) /змакс- Обычно это достигается при использовании частот ВЧП порядка сотен килогерц, единиц и десятков мегагерц с помощью ферритовых и тонкопленочных головок. Частотно-независимый сдвиг ФЧХ на я/2 и фазовые искажения. Фазочастотная характеристика ТМЗВ описывает зависимость от частоты суммарного фазового сдвига гармонического сигнала между его входом и выходом. Для получения однозначных результатов из последующего анализа исключается детерминированная составляющая фазового сдвига, обусловленная задержкой процесса воспроизведения относительно процесса записи. Выделяют три основные компоненты ФЧХ: постоянный частотно-независимый сдвиг ад, линейный (пропорциональный частоте) фазовый сдвиг Ра (t), флуктуирующие фазовые искажения 7 ( , t)- Постоянный фазовый сдвиг = п/2 (рис. 2.7, прямая 2) возникает вследствие дифференцирования сигнала индукционными воспроизводящими головками. Это обстоятельство, мало существенное при аналоговой звукозаписи и модуляционной точной магнитной записи, приобретает большое значение в цифровой магнитной записи, так как фазовый сдвиг дифференцирования полностью изменяет форму воспроизводственного сигнала. Линейный фазовый сдвиг обусловлен электромагнитным Тэ и переменным запаздыванием, вследствие колебаний скорости носителя т (О, т. е. Ра (t) = [тэ -4- т (t)] со (прямые 3 на рис. 2.7). Флуктуирующие фазовые искажения у (со, t) по абсолютной величине относительно малы (кривые 4 на рис. 2.7), причины их многообразны: специфика процесса записи на магнитный носитель, саморазмагничивание сигналограммы, потери в сердечниках магнитных головок, потери при согласовании головок с усилителями и т. д. Таким образом, суммарная ФЧХ ТМЗВ имеет вид (рис. 2.7, кривые /): Ф (со, О о + Рсо (О + у ( , о = /2 + [-э + т (01 со + 7 (со, О- Постоянное запаздывание сигнала на и Тд искажений его не вызывает. Компонента у (со, t) относительно невелика (особенно в области средних частот), поэтому наибольший вклад в фазовые искажения вносит постоянный фазовый сдвиг = л;/2 и для приближенного анализа систем цифровой магнитной звукозаписи достаточно учитывать только эту величину. При этом удобно использовать простую аппроксимацию комплексной передаточной функции ТМЗВ вида: /( (со) = (О ехр (I со /coi + /я/2), (2.5) где - круговая частота, соответствующая максимуму АЧХ ТМЗВ. Рассчитанная по формуле (2.5) АЧХ соответствует реальной характеристике (рис. 2.8).  Рис. 2.7. Фазочастотная характеристика ТМЗВ и ее основные компоненты -40 ги/8000 Si/woo ючт я=Ю11*,мкм Рис. 2.8. Амплитудно-волновая и фазо-волновая характеристики ТМЗВ: / - аппроксимированная; 2 - реальная
Ограничение полосы пропускания в области низккх частот. Наличие дифференцирования и конечные размеры воспроизводящей магнитной головки исключают возмолсность воспроизведения постоянной составляющей и крайних низкочастотных компонент сигналов. Это приводит к флуктуациям базовой линии таких цифровых сигналов, в спектрах которых присутствуют крайние низкочастотные компоненты (рис. 2.9) [58].  ь Рис. 2.9. Флуктуации базовой линии УФМ сигнала при про.\ож-дении через ТМЗВ: а - ток чапнси; б - напряжение воспроизведенного сигнала Интерференция откликов. Существенная неравномерность АЧХ, в частности, ее экспоненциальный спад в большей части полосы пропускания, а также стремление увеличить тактовую частому для повышения скорости записи-воспроизведения и плотности записи приводит к значительному возрастанию интерференцки откликов (ИО). ИО проявляется в изменениях амплитуд, сдвигах пиков и нуль-пересечений сигналов в зависимости от характера передаваемой комбинации символов (рис. 2.10). Последствия возникших искажений воспроизводимого сигнала показаны для следующих характерных случаев: 1) два соседних перемагничивания из одного состояния насыщения в другое (рис. 2.10, а). В результате ИО наблюдается эффект, сдвига вершин откликов, при котором временной интервал Т'а^Т^. Для любой формы откликов с уменьшением амплитуда выходного сигнала стремится к нулю, а величина приближается к конечному пределу; 2) три соседних перемагничивания носителя (рис. 2.10,6). В этом случае отклик, соответствующий центральному пере-магничиванию, претерпевает большее падение амплитуды, чем боковые отклики. Кроме этого, происходит сдвиг базовой линии результирующего сигнала в положительную область; 3) четыре последовательных перемагничивания носителя (рис. 2.10, в). В связи со свойством симметрии два крайних отклика имеют одинаковые амплитуды. Также одинаковые, но меньшие и разных знаков амплитуды имеют два внутренних отклика. В результате возникает значительный сдвиг базовой линии. ..- Комбинации символов, при которых вероятность ошибок из-за ИО является наибольшей называют наихудшими . Основной мерой борьбы с ИО является коррекция АЧХ и ФЧХ, выравнивающая характеристики ТМЗВ и расширяющая полосу его пропускания. Флуктуации параметров ТМЗВ. Любые механизмы транспортирования носителя записи принципиально не могут обеспечить абсолютно точное его перемещение в рабочей зоне магнитных головок вследствие неизбежных вибраций конструкций и собственных случайных колебаний магнитного носителя [14]. В рабочей зоне магнитных головок имеют место довольно сложные колебания магнитного носителя: перпендикулярные, вызывающие изменения расстояния между головкой и носителем (флуктуирующий некон- 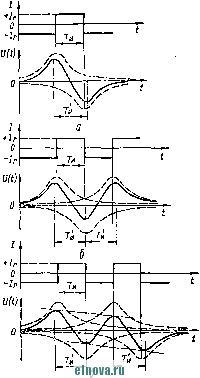 Рис. 2.10. Эффекты интерференции откликов такт, обозначаемый в пространственной области а{х), а во временной - а (t); поперечные, приводящие к изменению ширины записываемой дорожки (Ь {х), Ъ [t)); динамические перекосы (б (х), 6 {t)); крутильные колебания, происходящие в плоскости, перпендикулярной плоскости перекосов (создающие неконтакт, особенно ощутимый в многодорожечной записи, а {х, у), а (t, у)). Магнитные носители записи характеризуются также некоторой нестабильностью толщины рабочего слоя (разнотолщинностью {d{x),d{t)), шероховатостью поверхности (dm(х), dmit)), непостоянством остаточной магнитной индукции (B(x), B{t)) и коэрцитивной силы (Н^{х), (t)). Кроме того, флуктуации параметров ТМЗВ могут быть вызваны случайным попаданием в рабочий слой носителей записи частиц ныли. Величины перечисленных нестабильностей невелики, порядка единиц процентов (и даже менее процента) от их среднего значения. Изменения величин b (х), Bix) и Я^, (л:) в основном определяют флуктуации среднего значения модуля передаточной функции ТМЗВ, т. е. отдачу сигналограммы. Изменения значения (i(x) влияют и на отдачу сигналограммы (так как = bdB,.), и на ее АВХ. Характеристики конструктивных нестабильностей элементов ТМЗВ и их преобразования, приводящие к флуктуациям передаточной функции канала К{, х), К{(о, t) подробно описаны в работе [14]. Все малые механические нестабильности (в пределах одной партии магнитного носителя и для данного аппарата магнитной записи) могут быть отнесены к классу стационарных случайных процессов и включают в себя широкополосные и узкополосные составляюш,ие, которые имеют, как правило, нормальное распределение. Результатом флуктуации передаточной функции ТМЗВ является паразитная амплитудная модуляция (ПАМ) выходного сигнала, которую иногда называют гладкой составляющей ПАМ. Гладкая составляющая ПАМ имеет непрерывную огибающую, амплитуда которой увеличивается по мере уменьшения длины волны записи (рис. 2.11, а). При воспроизведении неконтакт создается за счет флуктуации расстояний между головкой и носителем из-за шероховатости их рабочих поверхностей, а также из-за появления нестабильного аэродинамического зазора, всегда имеющегося на высоких скоростях перемещения носителя. При этом в носителе возникают автоколебания со средней частотой 200...300 Гц и средней шириной полосы 100...150 Гц, относящиеся к узкополосным составляющим вели-чкны неконтакта. Среднее значение неконтакта л; 0,15...1 мкм и его дисперсия al = 0,01...0,1 мкм зависят от качества поверхности носителя и силы его прижима к магнитной головке. Корреляционная функция неконтакта имеет вид Ra = о„ ехр [- {Qxf/i] cos Qx. (2.6) Функция распределения величин неконтакта подчиняется нормальному закону: = {V Ььа^Г' ехр [- (а - aof/2al]. (2.7) Корреляционная функция параметрического тракта воспроизведения при наличии флуктуирующего неконтакта определяется как R = m [Ка (гЩ Ка (- ix)] = ехр {- 2aoQ + aiQ [1 -- + exp{-{AQYxyi]cosQx]], (2.8) где т[-] - математическое ожидание. Графики корреляционных функций, построенные в соответствии с выражениями (2.6) и (2.8\а также график экспериментальной корреляционной функции показаны на рис. 2.11, б. Для того чтобы найти функцию распределения флуктуирующей АВХ тракта воспроизведения W, необходимо определить обратную функцию контактных потерь при воспроизведении (2.2), вычислить f! BlP.o.x). jyliii  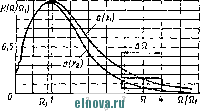 Рис. 2.11. Влияние паразитной амплитудной модуляции: а - форма огибающей (2 > i): б- корреляционные функции не-коктакта (/), тракта воспроизведения {2), экспериментального ТМЗВ (3); в - АВХ ТМЗВ (а {Хг) > а (х,)) и ее Ступенчатая аппроксимация ее производную и подставить полученные соотношения в формулу (2.7). Выполнив простые преобразования и задавшись частотой сигнала = 2л1\, получим Wb = [У2лаКа (Щ ехр (- [1п Ка (Ц - In Ка ( o)]/20b}, где In К а {Щ = ар а„ = oQ. Таким образом, флуктуирующая АВХ тракта воспроизведения подчиняется логарифмически нормальному закону распределения неконтакта. Отклик подобного параметрического канала на входной гармонический сигнал является уже нестационарным случайным процессом. Такой н<е эффект дает флуктуирующий неконтакт в тракте записи без ВЧП (см. формулу (2.3)). В тракте записи с ВЧП контактные потери обычно невелики и ими пренебрегают. В то же время среднее значение волновых потерь при записи с ВЧП Ккзп (Et Ккз из-за специфических потерь процесса записи, называемых размагничиванием при записи или самостирапием . Строгий анализ ПАМ в ТМЗВ сопряжен с трудностями, обусловленными тем, что флуктуирующую АЧХ последовательной парал:ет-рической системы нельзя определить как произведение АЧХ составляющих ее элементов. Такое перемножение мол ю выполнять для систем, имеющих частотно-независимые характеристики передачи: К (со, t) = К (t). Этому требованию соответствуют АЧХ, получаемые ступенчатой аппроксимацией рабочих участков реальных характеристик. При этом частота сигнала должна быть намного больще средней частоты неконтакта (Qq й), а полоса частот неконтакта намного меньше средней частоты неконтакта (AQ < Q) (рис. 2.П, в). Коэффициент передачи ТМЗВ можно записать в виде Кз.в (й> X) л; ехр [- 1,4йаз (х)] ехр [- Qa (х)] = = exp{-QllAaAx) + a,{x)]}. (2.9) Показатель степени формулы (2.9) содержит два нормально распределенных некоррелированных стационарных процесса. Сумма таких процессов также является стационарным случайным процессом с нормальным распределением и параметрами: тц; = = -f /П1в; 02 = Оз + Ов. Если положить аоз = Оов = и Оаз = Оав = а, ТО формулу (2.9) можно переписать в виде /(з.в (й. х) л; ехр [-йаз.в (х)], где Сз.в {х) = 1,4аз {х) + Ов (А - величина эквивалентного неконтакта ТМЗВ. При этом От] = 1,4аоз + ов = 2,4ао; о^з.в = (1 Дойз) + + Оов та Зо. Таким образом, нормальному распределению эквивалентного неконтакта процесса записи-воспроизведения соответствует логарифмически нормальное распределение АВХ: W3.b []/2аз.вКэ.в (й)] ехр {- [In Кз.в (Q) - 1п/Сз.в (йо)]/2оз.в}, (2.10) где In /Сз.в {Щ = 2,4aoQ; 03 I JoQ. Выражение (2.10) справедливо при записи без ВЧП и полной компенсации всех потерь, кроме контактных. Графики расчетных и экспериментальных распределений АВХ ТМЗВ для разных длин волн записи показаны на рис. 2.12. Как следует из этих графиков, на практике зависимость глубины ПАМ от длины волны записи выражена менее резко, что объясняется множественностью причин, порождающих ПАМ. Другой составляющей ПАМ (называемой часто импульсной составляющей) являются эпизодически возникающие глубокие провалы огибающей воспроизведенного сигнала - выпадения . Выпадения обусловлены локальными нарушениями контакта между головкой и носителем (вследствие немагнитных вкраплений в рабочий слой носителя, выкрашивания рабочего слоя, попадания продуктов выкрашивания, окатышей или песчинок между головкой и носителем и др.), являясь одной из основных причин сбоев аппаратуры цифровой магнитной звукозаписи (рис. 2.13). Положение выкрошенных участков и вкраплений в рабочий слгй в процессе магнитной записи-воспроизведения постоянно. Поэтому контактные потери записи-воспроизведения определяются с учетом эквивалентного неконтакта: /Сз.в (й, х) ехр [- 2,4Qa (л;)]. В случае смещения окатышей и песчинок на носителе их влияние может сказаться дважды - при записи и при воспроизведении. На высококачественных носителях выпадения относительно редки и распределены вдоль них по закону Пуассона. На носителях среднего качества распределение выпадений необходимо устанавливать экспериментально. Траектория огибания окатышей и песчинок магнитным носителем приближенно аппроксимируется выражением вида [10] а{х) = Со ехр (- х/х^), где XftSv 300...500 мкм (при размерах окатыша или песчинки порядка 3 мкм). Глубина и длительность выпадений нарастают по мере увеличения плотности записи. В зависимости от причины, вызвавшей выпадение , потенциальная возможность восстановления сигнала может сохранять-<;я. Намагниченный окатыш дает еще более сложную импульсную помеху. Расчетная глубина провалов огибающей воспроизведенного сигнала при фиксированных дефектах размером 3 мкм и разных длинах волн записи показана графически на рис. 2.14. 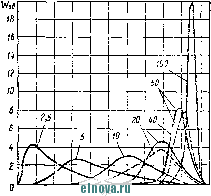 Рис. 2.12. Распределения АВХ неконтакта ТМЗВ при разных длинах волн записи Яо и значениях - 0,3 мкм, Са = 0,2 мкм (----экспериментальные АВХ) tfi] Рис. 2.13. Причины выпадений : а - немагнитные вкрапления; б - выкрашивание; б - окатыши и песчинки При магнитной звукозаписи возникают флуктуации парал4ет-ров тракта из-за колебаний скорости носителя. Согласно современным представлениям колебания скорости являются нестационарным случайным процессом, включающим в себя узкополосные и широкополосные составляющие [12]. Узкополосные составляющие обусловлены например, эксцентриситетом, эллиптичностью и динамическими биениями вращающихся деталей, неоднородностью упругих свойств обрезиненных роликов, качениями роторов элект- 1 2 3 4 5 6 7 ... 16 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||