
|
| |
|
|
Главная » Книги и журналы 1 ... 9 10 11 12 13 14 15 16 соответствует намагниченности под центром зазора. Поле рассеяния головки Н {х) относится к оси X. Полный поток в воспроизводящей магнитной головке, вызванный горизонтальной составляющей намагничивания Мд. {х - х'), получается интегрированием бесконечно малых потоков последовательных намагниченностей на носителе [59] Ф, (х') = ii,b j J ix-x, у) {X, у) dxdy, (5.3) где а - величина неконтакта; d - толщина рабочего слоя носителя записи; Ь - ширина элемента магнитного носителя; - проницаемость магнитного материала носителя. Аналогично для перпендикулярной составляющей намагниченности My {х - х') a-\-d д:=+оо Фу{х')=-\1оЬ j J My{x--x,y)Hy{x,y)dxdy. (5.4) ii=a x=-cx> Скалярные составляющие М^ и My подчиняются правилу линейной суперпозиции. Уравнения (5.3) и (5.4) являются основными при анализе процессов цифровой магнитной звукозаписи. При использовании индукционной магнитной головки воспроизведенный сигнал пропорционален производной потока по времени тогда a+d оо {X) = M,ii,bvw dy дМАх-х') а -со где Mr - амплитуда намагниченности. В интеграле свертки (5.5) можно расценивать как весовую функцию. В том случае, когда My = О, а горизонтальная намагниченность Мх состоит из чередований единичных функций, t М; (X - X) = 2Мг б (х - X), где б (х - х') - дельта-функция. Таким образом, выходное напряжение для записанного двоичного сигнала можно получить из единой стандартной формы выходного сигнала. Реально изменение намагниченности не может представлять собой единичную функцию. В зависимости от того, какой функцией описывается переходная зона и действие каких волновых потерь учтено при воспроизведении, выражение для отклика тракта имеет разную сложность. Например, если рабочий слой носителя однородно намагничен во всех направлениях, а воспроизведение осу- ществляется магнитной головкой с бесконечно узким рабочим зазором, то где a - скорость расширения переходной зоны; А - параметр, определяющий протяженность переходной зоны; Ki - коэффициент пропорциональности [16]. При преимущественном влиянии щелевых и контактных потерь и допущении, что А не зависит от d, (X) = К,М, iarctg -4±- - arctg (5.7) где /Сз - коэффициент пропорциональности; б - полуширина зазора магнитной головки. Отклик тракта, описываемый формулами (5.6) и (5.7), имеет колоколообразную симметричную форму. Длительность отклика тем больше, чем больше потери в ТМЗВ. Точные формулы для расчета {х') при учете всех потерь в тракте сложны, поэтому на практике применяются различные аппроксимирующие функции. Наибольшее распространение в настоящее время получили девять аппроксимаций (рис. 5.5) [71]. Наиболее оптимальной из них для высокоплотной цифровой магнитной записи считают аппроксимацию вершины отклика и одного из спадов функцией е- , а другого спада - функциями 1/(1 + х^ + х^) или 1/(1 + + I х з). При высокоплотной цифровой магнитной записи воспроизведенные отклики асимметричны. Это объясняется влиянием ряда факторов, основными из которых являются [16]: наличие перпендикулярной составляющей намагниченности; векторный характер намагниченности по толщине рабочего слоя; наличие размагничивающего поля предыдущих участков носителя; фазовые искажения при записи
Рис. 5.5. Аппроксимации одиночного отклика: 1 -ie- + 1/(1 + ж^)1/2; 3 - 1/(1 + + I х f); 3 -S - 1/(1 -1- ] x -6); 5 1/ (1 ! I ,v ,1.6 7 - 1/(1-1- x): - 1/(1 + л:= -f x) I x П, 9 - 1/(1 + х' + и] воспроизведении; фазовые искажения, возникающие из-за комплексного характера магнитной проницаемости сердечников головок. Для повышения плотности цифровой магнитной записи необходимо корректировать АЧХ и ФЧХ ТМЗВ. При этом полного выравнивания волновой характеристики обычно не требуется. Чаще ставят задачу уменьшить длительности откликов, т. е. снизить степень их интерференции при заданной плотности записи. Рассмотрим некоторые типы корректоров. Трансверсальный фильтр представляет собой корректор с линейно изменяющейся ФЧХ и коэффициентом передачи 7 (©) = (1 + /( cos (ОТ) e . Корректор такого типа предназначен для подъема АЧХ в области низких и высоких частот. Выходной сигнал фильтра у (/) на схеме (рис. 5.6) представляет собой разность воспроизведенного отклика и задержанного на время ± т того же отклика, но с уменьшенной mk-i АохН-г)  I I т
 Рис. 5.6. Структурная схема трансверсального фильтра (а) и временные диаграммы его работы (б) в т раз амплитудой. Полученный результирующий отклик имеет длительность меньшую, чем исходный. Уровень появляющихся при этом паразитных боковых выбросов можно уменьшить до приемлемой величины. Увеличение числа задержек (количества отводов линии задержки) улучшает корректирующие свойства. Однако число задержек можно и уменьшить до одной. В этом случае трансверсальный фильтр превратится в свою разновидность, именуемую косинусным фильтром. Косинусный фильтр. Кроме упрощения конструкции, этот фильтр позволяет устранить асимметрию формы выходного сигнала, возникающую из-за нестабильности параметров линии задержки. Схема косинусного фильтра (рис. 5.7) состоит из линии задержки на время т амплитудного делителя с коэффициентом деления К и дифференциального усилителя. Вход линии задержки нагружен на волновое сопротивление (согласован), а выход - не нагружен (не согласован). В результате сигнал отражается от выхода и его амплитуда удваивается. Таким образом, выходной сигнал у {t) корректора имеет вид у (О = X it) -K[x{t + nc)-Vx{t- т)]/2, а передаточная характеристика косинусного фильтра 7 (ю) = 1 - - К cos ют. 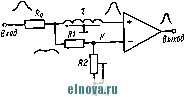 Рис. 5.7, Схема косинусного фильтра Эффект сужения откликов тем больше, чем выше отношение сигнал/шум в канале. Например, при отношении сигнал/шум около 35 дБ и отношении т/Г = 0,7 (где Т - длительность отклика на уровне 0,5 его амплитуды), К = 0,7 можно получить повышение продольной плотности записи примерно на 30 отношении сигнал/шум около 30 дБ этот выигрыш составляет только 13 % [69]. .Лпертурный фильтр - это корректор, основанный на суммировании производных отклика в целях его сужения (рис. 5.8). В случае асимметрии отклика эффект сужения значительно меньше. Апертурный фильтр чаще всего выполняют на линиях задержки. Структурная схема фильтра для производных второго порядка показана на рис. 5.9. Короткозамкнутые линии задержки осуществляют дифференцирование сигнала, а линия задержки на время 2т служит для временного согласования входного отклика X (i) и его второй производной х (t). Однако уже при r(t] - Рис. 5.8. К пояснению принципа сужения симметричного отклика суммированием производных xmxamxd)- Применение четвертой производной на практике нецелесообразно ввиду существенного ухудшения отношения сигнал/шум. Прямые корректоры. Требуемую коррекцию воспроизведенного сигнала можно выполнить с помощью специальных корректирующих цепей мостового (рис. 5, 10, а) или скрещенного (рис. 5.10, б) типов 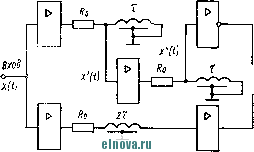 - Z Выход -о хЮ-ихМ Рис. 5.9. Активный сужающий фильтр [14]. Недостатком мостовых схем является нелинейно;ть их фазовой характеристики, приводящая к появлению асимметрии воспроизведенных импульсов. Частотную и фазовую коррекцию можно выполнить также с помощью активных iC-цепей. 3. СИНХРОНИЗАЦИЯ ВОСПРОИЗВЕДЕННЫХ СИГНАЛОВ Применительно к цифровой магнитной звукозаписи можно выделить следующие виды синхронизации: временную, которая включает синхронизацию по моменту прихода фронта сигнала, и тактовую. Синхронизация по моменту прихода фронта сигнала определяет моменты начала формирования опорных сигналов в корреляционных детекторах. Тактовая синхронизация определяет частоту повторения элементов воспроизведенного сигнала или временные параметры модуляции; частотную, при которой устанавливается соответствие средней частоты спектра воспроизведенного сигнала частоте настройки демодулятора; фазовую, необходимую при реализации в демодуляторе алгоритма когерентного приема.  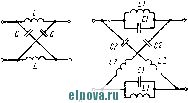 Рис. 5.10. Корректоры мостового (а) и скрещенного (б) типов Частотная и фазовая синхронизации являются желательными, но не обязательными операциями, в то время как временная синхронизация - неотъемлемая часть процесса демодуляции воспроизведенных сигналов. Синхронизация может проводиться с использованием специального сигнала синхронизации и информационных сигналов (самосинхронизация). В первом случае для синхронизации выделяется отдельная дорожка или отдельные строки (при многодорожечной записи), по которым могут передаваться специальные синхронизирующие сигналы. Моменты передачи последних согласованы либо с моментами передачи информационных сигналов, либо с моментами появления определенных состояний в сигналах. Длительность, частоту следования и корреляционные свойства синхросигналов обычно подбирают для обеспечения быстрого и надежного вхождения в синхронизм, первоначальной синхронизации и восстановления ее в случае срыва. Использование отдельной дорожки для синхронизации снижает эффективность использования поверхности магнитного носителя. Кроме того, информационные сигналы и синхронизирующие сигналы могут претерпевать неодинаковые искажения вследствие неидентичности характеристик ТМЗВ и флуктуации конструктивных параметров. Все это снижает помехоустойчивость обработки воспроизведенного сигнала. Во втором случае информация о всех параметрах сигналов, не- обходимая для осуществления захвата и слежения в системе синхронизации, извлекается из воспроизведенных сигналов. Достоинством метода является более высокая эффективность использования поверхности носителя записи. К недостаткам можно отнести: срыв синхронизации при прекращении записи информации, более низкая помехоустойчивость, более сложная аппаратурная реализация. Основные трудности при разработке блоков синхронизации для магнитной звукозаписи связаны с неравномерностью скорости движения носителя, ИО и другими помехами. Наиболее часто применяемые в цифровой звукозаписи способы самосинхронизации можно разделить на инерционные и безынерционные. Инерционные способы самосинхронизации основаны на применении инерционных звеньев: резонансного контура, подсистемы фазовой авгоподстройхи частоты (ФАПЧ), синхронизируемого генератора и др. В этих случаях блок синхронизации не реагирует на отдельные амплитудные и фазовые искажения. Безынерционные способы заключаются в том, что формируемый синхросигнал имеет жесткую временную привязку к фронтам воспроизведенного информационного сигнала. Оценка каждого из этих способов основывается на сравнении помехоустойчивости по отношению к различным типам помех и искажений сигналов в КМЗВ, а именно: неравномерности скорости движения носителя, ПАМ, ИО, аддитивным помехам. В установившемся режиме мгновенная скорость носителя y(0 = Uo +Ау (0 + Аи it), где v - номинальная скорость носителя; Аи (/) - погрешность номинальной скорости (медленно изменяющаяся функция времени); Аи {{) - колебания скорости. В высококачественных аппаратах цифровой звукозаписи, предназначенных для работы в установившемся режиме, обычно удается уменьшить Аи (/) и Ау (/) до значений, не нарушающих нормальную работу инерционных блоков синхронизации. Одной из основных причин, препятствующих повышению помехоустойчивости подсистемы синхронизации, является переменное запаздывание сигнала. Запаздывание, т. е. временная погрешность воспроизведенного сигнала при Ау (if) = О и Аи (/) = О, определяется как б a частота и средняя длительность периода воспроизведенного сигнала где F it) - функция временного масштаба [25]. Прп небольших колебаниях скорости длительности тактов изменяются незначительно. Однако средние значения периодов колебаний скорости Tj, значительно больше длительностей тактов Тт. Поэтому за время Tj, возникает временная погрешность, которая может оказаться большей длительности нескольких тактов. Заметно ухудшает условия синхронизации и паразитная ЧМ, приводящая к дисперсии сигнала по частоте. Недостаточная ширина полосы частот, неравномерности АЧХ и ФЧХ КМЗВ, а также стремление повысить тактовую частоту, приводят к значительному увеличению ИО, что, в свою очередь, существенно снижаег помехоустойчивость самосинхронизации. При достаточно большом отношении сигналшум вероятность сбоя синхронизации из-за всплеска аддитивной помехи крайне мала, но она резко возрастает в моменты провалов огибающей воспроизведенного сигнала из-за ПАМ. Основными источниками аддитивных помех Б КМЗВ являются аддитивная компонента структурного шума носителя и шумы вход-cmmfr-i I г--I гг1шда ш ibix цепей усилителей воспроизведения. Инерционные блоки синхрони- > Р Рис. 5.11. Структурная схема ана- зации принципиально обеспечива-логовой подсистемы ФАПЧ ют наибольшую помехоустойчи- вость по отношению к аддитивным шумам. Это объясняется тем, что любой вид инерционности эквивалентен соответствующему сужению полосы частот в канале синхронизации. Сужение полосы частот приводит к увеличению отношения сигнал/шум и повышению достоверности работы синхроблока. Наиболее совершенными устройствами инерционной синхронизации являются устройства, основанные на подсистемах ФАПЧ: аналоговых, цифровых, цифро-аналоговых. Для любых подсистем ФАПЧ достоинством является возможность установления и поддержания временных соотношений между синхросигналом и усредненными наиболее вероятными положениями фронтов сигнала. Это позволяет использовать демодуляторы, обладающие асимптотически оптимальной помехоустойчивостью к аддитивным помехам. Аналоговая подсистема ФАПЧ состоит из трех основных функциональных элементов (собранных на ана.г-огэвых схемах): фазового дискриминатора J, петлевого фильтра 2 и генератора, управляемого напряжения (ГУН) 3 (рис. 5.И). Входной сигнал, фаза которого должна отслеживаться, сравнивается с синусоидальным колебанием опорного генератора, управляемого напряжением, в результате чего вырабатывается напряжение, пропорциональное их мгновенной разности фаз. Этот сигнал ошибки после фильтрации используется для управления мгновенной частотой ГУН. Простота аналоговой подсистемы ФАПЧ не избавляет ее от недостатков, основными из которых являются: чувствительность к дрейфу постоянной составляющей и к насыщению; трудности создания подсистем ФАПЧ высших порядков; необходимость начальных калибровок и периодических регулировок. От этих недостатков свободны цифровые подсистемы ФАПЧ, которые обычно разделяют на четыре класса, отличающиеся видом фазового дискриминатора [26]: ВхоШ сигнал 1) подсистема ФАПЧ с триггером. В этой подсистеме ошибка по фазе связана с длительностью промежутка времени между установкой и сбросом триггера одними из фронтов (положительными или отрицательными) входного сигнала и опорного тактового генератора; 2) подсистема ФАПЧ с АЦП, работающим на частоте Найквиста. В данной подсистеме входной сигнал дискретизируется с частотой Найквиста; 3) подсистема ФАПЧ с фиксацией нуль-пересечений. В такой подсистеме дискретизация осуществляется в моменты нуль-пересечений входного сигнала; 4) подсистема ФАПЧ с дискретизацией при опережениях и запаздываниях. В этой подсистеме фазовый дискриминатор определяет опережение-запаздывание входного сигнала относительно опорного тактового сигнала. В подсистемах 1, 3, 4-го классов фаза входного информационного сигнала измеряется по отношению к фазе вырабатываемого синхроколебания (подсистемы с неравномерной дискретизацией). В подсистеме 2 фаза входного сигнала измеряется относительно эталонного фиксированного колебания (подсистема с Выход генератора Ь Рис. 5.12. Структурная схема генератора с цифровым управлением (а) и временные диаграммы его работы (б) равномерной дискретизацией). Основная структурная схема цифровой подсистемы ФАПЧ аналогична схеме, изображенной на рис. 5.И, но в ней используется фазовый дискриминатор с дискретизацией, цифровой фильтр и генератор с цифровым управлением. В качестве дискретизируемого фазового дискриминатора применяется либо триггер, либо АЦП. Цифровым эквивалентом аналогового интегрирующего элемента, например, Т^С-фильтра, является накапливающий сумматор, т. е. сумматор с задержкой, включенной в цепь обратной связи. Другим вариантом цифрового фильтра является последовательный фильтр типа iV перед М [26]. Генератор с цифровым управлением представляет собой программируемую схему деления на N (рис. 5.12). Сигнал, вырабатываемый кварцованным задающим генератором U частота которого в п раз больше тактовой и определяет разрешение по фазовой ошибке, подается на счетчик 2. Содержимое счетчика сравнивается с выходным сигналом t/ex на компараторе 5 и, когда они совпадают, компаратор вырабатывает им тулье V- Импульсы t/g сбрасывают счетчик 2 в нулевое состояние и служат выходным сигналом генератора с цифровым управлением. Меняя входной сигнал 1]%, можно регулировать период f/g. в цифровой магнитной звукозаписи используются фазовые дискриминаторы с характеристиками двух типов: релейной и пилообразной (рис. 5.13). В том случае, когда определяющим фактором является точность синхронизации по фазе, следует выбирать релейную характеристику, имеющую малую зону неопределенности. Однако фазовый дискриминатор с пилообразной характеристикой обладает более высокой помехоустой^.ивостью в условиях шумов. При проектиэовании подсистем ФАПЧ обычно стремятся, чтобы в неустановившемся режиме полоса захвата была как можно шире, а после достижения установившегося режима - минимальная. Полосу удержания стремятся сделать максимальной, а время вхождения в синхронизм (время захвата), величину и частотный диапазон выход
ь Рис. 5.13. Релейная (а) и пилообразная (б) характеристики фазового дискриминатора 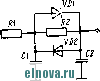 Рис. 5.14. Перестраиваемый петлевой фильтр шумов - минимальными. Но полоса захвата пропорциональна полосе шумов, т. е. имеется противоречие в получении требуемых значений. В какой-то мере это противоречие можно разрешить, применяя петлевые фильтры с перестраиваемыми полосами пропускания, i Возможность перестройки полосы пропускания поясним на примере ФНЧ, состоящего из двух последовательно включенных RC-цепей (рис. 5.14). Параллельно активному сопротивлению второй цепи R2 встречно включены два диода VD1, VD2. Диоды открыты при переменном входном сигнале. В результате сопротивление R2 шунтируется и устанавливается постоянная времени фильтра, обеспечивающая широкий диапазон захвата цепи синхронизации. Когда подсистема ФАПЧ вошла в синхронизм, появляется сигнал постоянного тока и диоды запираются. При этом устанавливается постоянная времени, соответствующая двум последовательно включенным iC-цепям и узкой полосе захвата. Для уверенного вхождения в синхронизм необходимо, чтобы полоса захвата была больше суммарной нестабильности частоты входного сигнала и синхросигнала, вырабатываемого ГУН. Для улучшения характеристик подсистем синхронизации на основе ФАПЧ необходимо также уменьшать величину фазовых дрожаний синхросигнала, которые вызываются низкочастотными составляющими на входе ГУН. Одним из способов уменьшения фазовых дрожаний является введение делителей частоты на входах фазового дискриминатора. Использование делителей частоты, т. е. уменьшение частоты среза петлевого фильтра позволяет подавить высокочастотные составляющие фазовых дрожаний и уменьшить 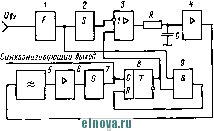 полосу шумов пропорционально коэффициентам деления. Однако-при этом увеличивается время вхождения в синхронизм Рассмотрим примеры реализации инерционных подги:тем синхронизации. На рис. 5.15 изображены структурная схема и временные диаграммы работы подсистемы тактовой синхронизации УФМ, (2,7) и других сигналов с некратными соотношениями характеристических интервалов. Воспроизведенный и преобразованный в прямоугольную форму сигнал Овх поступает на вход формирователя / импульсов, который вырабатывает короткие импульсы Ul из всех нуль-пересечений входного сигнала. Импульсы Ul расширяются одновибратором 2 до длительности, равной Т,./2, и подаются на один из входов фазового дискриминатора 3, в качестве которого использован элемент с тремя выходными состояниями. При использовании, например, ИМС 155 серии удобно выбрать буферный усилитель с тремя состояниями К155ЛП8. На другой вход фазового дискриминатора 3 поступает опорное колебание (/g, снимаемое с единичного выхода триггера 8. Напряжение сигнала ошибки, отображающее разность фаз между входным сигналом и опорным колебанием, формируется с помощью С-цепочки, подключенной к выходу элемента с тремя выходными состояниями. При наличии на входе элемента 3 импульса Ui конденсатор С заряжается или разряжается в зависимости от знака напряжения f/g, а при отсутствии импульса U конденсатор С оказывается отключенным от выхода элемента 5. Т^С-цепочка подсоединена к буферному повторителю 4 с высоким входным сопротивлением, который предотвращает разряд конденсатора С через нагрузку в промежутках между импульсами U- Сигнал ошибки U интегрируется фильтром 5 низких частот, усиливается усилителем постоянного тока 6 и подается на вход ГУН 7 для управления его частотой. Генератор 7 вырабатывает прямоугольное колебание f/ средняя частота которого равна удвоенной тактовой частоте воспроизводимого с магнитного носителя сигнала. Для устранения фазовых рассогласований входного сигнала и опорного синхроколебания введена манипуляция фазы опорного колебания, осуществляемая с
Рис. 5.15. Структурная схема (а) и временные диаграммы (б) работы подсистемы тактовой синхронизации с коррекцией фазы опорного колебания 1 ... 9 10 11 12 13 14 15 16 |