
|
| |
|
|
Главная » Книги и журналы 1 ... 12 13 14 15 16 17 18 ... 38 сторов VTl, VT2 в схему преобразователя введены резисторы R5, R12, R13- При линейной зависимости проводимости каналов VT1, VT2 от управляющего напряжения неидентичность их характеристик может быть учтена при калибровке и не влияет на точность преобразования. Нижнюю граничную частоту входного преобразуемого напряжения определяет постоянная времени RuCi, а верхнюю граничную частоту задают ОУ А2, A3. Основным в схеме является А2, который в первую очередь и определяет динамические и точностные параметры преобразователя. В качестве А2, A3 рекомендуется использовать ОУ типа К544УД2А. От А1, А4 и А5 требуется только максимальная точность; поэтому могут быть применены прецизионные ОУ К140УД17 или К153УД5. г Преобразователь при использовании указанных ОУ обеспечивает при выходном напряжении 5 В преобразование номинального действующего входного напряжения до 200 мВ. В диапазоне частот входного сигнала от 20 Гц до 100 кГц обеспечивается приведенная погрешность менее 0,5%. Температурный дрейф пбгрешности примерно 0,15%/10° С. Эти параметры получаются для приведенных на схеме сопротивлений резисторов, когда преобразователь рассчитан для работы с входными напряжениями, имеющими коэффициент амплитуды меньш'е 4. При увеличении коэффициента амплитуды, который определяется сопротивлениями R1, R10, R14, соответственно увеличиваются температурные погрешности. Преобразователь напряжения в длительность импульса, обеспечивающий точность лучше 1%, при линейной зависимости формируемых импульсов от управляющего напряжения показан на рис. 4.54. Входное напряжение должно изменяться в пределах O...f/п. Таймер работает в режиме одновибратора, запускаемого по триггерному входу тактовыми импульсами амплитудой O...f/п- Синхронно с тактовыми импульсами на входе ОУ формируются импульсы с амплитудой, пропорциональной входному напряжению. Интегратор на базе ОУ обеспечивает преобразование входных импульсов в постоянное напряжение, которое подается на внутренний резисторный делитель таймера.- Чем больш'е входное напряжение, тем больше напряжение на выводе 5 и, следовательно, тем до больш'его напряжения должен зарядиться конденсатор С/, чтобы на выходе таймера установилось исходное напряжение. Для нормальной работы преобразователя период тактовых сигналов должен быть меньше RtCt и более чем в 10 раз меньш'е R\C\. Преобразователи напряжения в длительность импульса применяют в информационно-телеметрических системах АЦП и др. Простота схем на таймерах позволяет разместить их в непосредственной близости от датчиков аналоговых сигналов, на месте преобразовать аналоговую величину в цифровые сигналы, которые можно передавать по длинным линиям связи и не опасаться воздействия помех в линии на точность принимаемой информации. Преобразователь сопротивления в длительнвсть импульса, используемый в системах управления производственными процессами  1к -Вых от МП - Такты -у- КР1006ВИ1 5В ~¥ f Рис. 4.54. Схема преобразователя напряжения в длительность импульса Рис. 4.55. Схема преобразователя сопротивления в длительность импульса или телевизионной игре, построенных на микропроцессоре К580ИК80, можно выполнить на одном таймере (рис. 4.55). Тактовые импульсы с выхода микропроцессора подаются на триггерный вход таймера, включенного по схеме одновибратора. Длительность выходного сигнала таймера, равная 1,1 RiCi, пропорциональна сопротивлению потенциометра Rt. Этот сигнал поступает на вход микропроцессора, который увеличивает содержимое внутреннего регистра, пока остается высоким выходное напряжение таймера. Когда необходимо ввести в микропроцессор информацию о значении сопротивления, происходит обращение к подпрограмме и на вывод 2 таймера подается сигнал запуска. Содержимое регистра микропроцессора увеличивается за время, обратно пропорциональное его тактовой частоте, обеспечивая прием 100 дискретных значений сопротивления потенциометра Ri. ГЛАВА 5 ОБЩИЕ ВОПРОСЫ ЦИФРОВОЙ ОБРАБОТКИ АНАЛОГОВЫХ СИГНАЛОВ Для цифровой обработки аналоговые сигналы должны подвергаться дискретизации, а затем квантованию. Сформированные в результате этих процедур цифровые сигналы подвергаются обработке с помощью цифровых систем. При выполнении каждого этапа преобразования аналогового сигнала в код вносятся погрешности, которые обычно делят на три группы: методологические, статические и динамические. Методологическая погрешность обусловлена самим принципом перехода от непрерывных сигналов к дискретным, когда в цифровые слова преобразуется не бесконечное, а конечное множество значений аналогового сигнала в течение некоторого времени его изменения. 5.1. ДИСКРЕТИЗАЦИЯ И КВАНТОВАНИЕ АНАЛОГОВЫХ СИГНАЛОВ Необходимое число преобразований аналогового сигнала в цифровой определяется спектром частот аналогового сигнала или требуемой точностью преобразования. В соответствии с теоремой отсчетов Шеннона непрерывный сигнал Ux (/) можно представить в виде суммы выборок этого сигнала, осуществляемых с интервалами времени Д7 [28]. Тогда / n= - оо где fmax=/2AT - максимальная частота в спектре входного сигнала. Из этой теоремы следует, что для тЬчного восстановления сигнала частота выборок его мгновенных значений должна быть по крайней мере в два раза больше fmax- Это правило справедливо при равномерной дискретизации, т.е. при одинаковых значениях AT, и оно определяет требуемое быстродействие АЦП. По существу дискретизацию непрерывного сигнала осуществляет УВХ, а собственно АЦП выполняет квантование этого выбранного сигнала, неизменного на интервале AT. Из сказанного следует, что дискретизация сигналов с высокочастотными составляющими может привести к возникновению существенных погрешностей в реальных АЦП с конечными динамическими характеристиками УВХ. Уменьшить эти погрешности можно, включив фильтры нижней частоты на входе УВХ либо увеличив частоту дискретизации. Последнее требует применения более быстродействующих АЦП, что не всегда приемлемо. Вместе с тем следует учитывать, что УВХ не всегда необходимо применять на входе АЦП. Объясняется это следующим образом. Время, необходимое для выполнения преобразования аналогового сигнала в цифровой, определяет максимальную погрешность обработки каждого выбранного значения изменяющегося во времени аналогового сигнала. Например, в случае синусоидального сигнала, подаваемого непосредственно на вход АЦП, от момента начала преобразования /н до момента окончания преобразования /к входной сигнал изменится на величину AU. АЦП не воспримет такое изменение Uey ТОЛЬКО В том случас, если AV<.IJ, где t/on- напряже1гие опорного источника питания, - число двоичных разрядов на выходе АЦП. Максимально допустимое изменение Ux за интервал времени Д7 = /н -4 зависит от параметров входного сигнала и АЦП и может быть рассчитано для худшего случая. Таким случаем является момент пересечения синусоидальным входным Сигналом ,своего нулевого уровня, когда величина AUex/AT максимальна и равна Umax2nfmax, гдс Umax - максимальнос значение вх- Следовательно, если AUex = Umax2n\maxATUon/2, то УВХ на входе АЦП не требуется. Если же последнее неравенство не выпол- няется, то возникает погрешность преобразования, связанная с неопределенностью, прямо пропорциональной AT. Уменьшение ДГ за счет увеличения быстродействия АЦП. обеспечивает прямо пропорциональное уменьшение погрешности преобразования, обусловленной неопределенностью значения AUbx в интервале времени 4 - 4-Использование УВХ позволяет обычно сузить интервал неопределенности до значения времени выборки УВХ мгновенного значения Ubx- На входе АЦП устройство выборки-хранения работает в трех режимах: слежение, хранение и выборка. В режиме слежения УВХ передает входной сигнал на выход без искажений. Затем по команде от внешнего устройства УВХ сохраняет на выходе значение Lbx, действовавшее в момент подачи команды. В этом режиме АЦП преобразует Lbx в цифровую форму. После окончания преобразования УВХ вновь переводится в режим слежения, однако для этого требуется некоторое время, которое и называется временем выборки 1в- Чем меньш'е это время, тем меньш'е погрешность неопределенности, которая уменьшается в AT/te раз при использовании УВХ на входе АЦП. Описанная погрешность неопределенности относится к динамической погрешности АЦП, для оценки которой используется понятие апертурной неопределенности, взаимосвязанной с апертурным временем. Действие апертурной погрешности проявляется как неопределенность момента, к которому относится результат преобразования аналогового сигнала. При выполнении преобразования аналогового сигнала в цифровой наибольшее время тратится на установление переходных процессов в аналоговых узлах схемы. Если частота выборок аналоговых сигналов повышается, то наступает момент, когда точность установления аналогового сигнала становится сравнимой с ш'агом квантования - минимальным дискретом Lbx различимого АЦП. Кроме того, при преобразовании из-за прямой передачи цифровых сигналов через, паразитные емкости в цепи аналоговых сигналов возникают дополнительные переходные процессы. Влияние этих переходных процессов тем больше, чем выше необходимая точность преобразования. Чем больше длительность переходных процессов в аналоговых узлах преобразователя, тем реже можно выполнять выборку новых значений Lbx. При этом существенное влияние на результирующую точность преобразования оказывают статические погрешности входящих в АЦП узлов. Сколь угодно малЫе значения методологической и динамической погрешностей преобразования нельзя использовать в полной мере при больш'их статических погрешностях узлов АЦП. Поэтому все составляющие погрешности преобразования должны снижаться равномерно, если необходимо создать рациональную по параметрам и аппаратурным затратам структуру АЦП. После дискретизации с помощью УВХ или одновременно с диск-!ретизацией (без УВХ) выполняется квантование дискрета [J\x, т. е. его преобразование в цифровой код. Зта операция иногда называется кодированием. Методологическую погрешность кодирования называют ш'умом квантования. Максимальное значение этой погрешности равно половине кванта, т. е. величине, равной /оп/2 +. Чтобы шум квантования не зависел от параметров входного сигнала, рекомендуют выбирать значение кванта, равное среднеквадратическому значению шума Ubx- В этом случае плотность вероятности такого шума в пределах кванта имеет равномерный закон распределения. 5.2. КОДЫ, ИСПОЛЬЗУЕМЫЕ В ПРЕОБРАЗОВАТЕЛЯХ Для совместной работы . АЦП с ЭВМ обычно используются разновидности натурального двоичного кода. Однако в некоторых случаях отдается предпочтение другим кодам. Например, для работы совместно с семисегментными светоиндикато-рами целесообразно использовать двоично-десятичный код, а .для АЦП, работающих в условиях повышенных внешних помех, наилучшие результаты может дать использование кода Грея. Любое целое число, в двоичном коде можно представить в следующем виде: /4u = a,2 -f a i2 ~-f ...-baoS , где а,- могут иметь значения О или 1. Если необходимо представить дробное число, то можно воспользоваться суммой Лд=ая2 -a . 2~ +-f ...-fai2~. В преобразователях используются одно-полярные и двухполярные коды. Простейшими однополярными кодами, используемыми в преобразователях, являются прямой двоичный код и двоично-десятичный. Для совместного рассмотрения основные разновидности этих кодов приведены в табл. 5.1. Таблица 5.1 Однополярные коды
Окончание табл. 5.1
систему счисления, воспользовавшись выражением 4= а,-2. Например, при коде i~ 1 1010 число Л = 1.24-0-2-Ьl-2-f0-2 = 8-f0-f2-f-0=10. Из табл. 5.1. видно, что прямой двоичнБш код может применяться только для однополярных сигналов. Если к Л'-разрядному прямому двоичному коду добавить слева разряд, то его можно использовать для задания полярности сигнала. Обычно число считают положительным, если в этом разряде установлен О, и отрицательным, если I. Однако такой код, называемый прямым двоичным со знаком, непригоден для совместного использования с ЭВМ. Преимуществом кода Грея является то, что при переходах в соседние кодовые комбинации изменяется значение только одного разряда. Это свойство кода делает его очень удобным для применения в преобразователях угол-код, поскольку исключается появление ложных промежуточных кодов. Преобразователи напряжение код, использующие на выходе код Грея и построенные на переключаемых компараторами усилителях тока [34], обеспечивают обычно большее, чем при других кодах, быстродействие. Объясняется это уменьшением влияния динамических ошибок, вызванных переходными процессами в аналоговых узлах преобразователя. Вместе с тем код Грея неудобно использовать тогда, когда необходима работа АЦП с ЭВМ или при выводе цифровой информации на ЦАП. В тех случаях, когда следует выполнить переход от кода Грея к прямому двоичному коду и наоборот, используют несложные логические схемы [29]. Прямой двоичный код преобразуется в год Грея следующим образом. При условии, что в крайнем л'евом разряде цифрового слова в прямом коде установлен О, то и в коде Грея в этом разряде должен быть 0. В следующем разряде слева направо каждое изменение значения разряда прямого кода требует установки I в коде Грея, а отсутствие изменения соответствует 0. В случае обратного преобразования из кода Грея в прямой крайние левые разряды совпадают, а при-перемещении слева направо каждый разряд в прямом коде будет дополнением от предыдущего разряда в прямом коде. С точки зрения простоты восприятия наибольшие преимущества имеют двоично-десятичные коды. В этих кодах каждая десятичная цифра от О до 9 может быть представлена группой из четырех двоичных цифр или тетрадой. Значения в тетраде больше 9 не разрешены. Двоично-десятичный код обладает избыточностью, поскольку каждая тетрада имеет всего 10/16 разрешенных значений дробного числа по сравнению с обычным прямым кодом (табл. 5.1). Хотя каждая тетрада позволяет сформировать 15 комбинаций из четырех цифр, однако 6 комбинаций не используются. Возможность исключения любых шести комбинаций приводит ко многим вариантам организации двоично-десятичных кодов. Код 8-4-2-1 в табл. 5.1 получается при использовании первых четырех степеней прямого кода: 2 = 8 2 = 4, 2 = 2, 2°= I. Во многих случаях применедия таких кодов вводят дополнитель^ ный разряд с весом, равным значению полной шкалы. Тогда при применении кода на выходе цифрового вольтметра или другого измерительногб прибора обеспечивается возможность контроля выхода напряжения за пределы диапазона измерения. Существенно большее распространение по сравнению с кодом 8-4-2-1 имеет двоично-десятичный код 2-4-2-1. В первом разряде тетрады в этом коде вместо обычного веса 8 используется вес, равный 2. Этот код имел широкое распространение в приборах 60-х годов, так как требовал наименьших аппаратурных затрат по сравнению с приборами, в которых применялись другие двоично-десятичные коды. Объясняется это тем, что когда все разряды равны 1, то полный диапазон шкалы обеспечивается без четвертого разряда тетрады. Для преобразования двухполярных аналоговых сигналов необходимо в цифровом слове иметь информацию о полярности сигнала. Для этих целей обычно являются удобными двухполярные коды, приведенные в табл. 5.2. Таблица 5.2. Двухполярные коды
Прямой код со знаком применяется в ЦАП, когда необходимо получить плавные переходы от малого положительного напряжения к малому отрицательному, а также в цифровых вольтметрах. Недостатком этюго кода является то, что значению нуля соответствуют два кода. Вследствие этого обычно требуются значительные аппаратурные затраты для правильного обнаружения знака. . Самым простым двухполярным кодом обычно считают смещенный код. Из табл. 5.2 нетрудно убедиться, что смешенный 3-разрядный код является прямым 4-разрядным кодом, у которого О в первом разряде соответствует отрицательному числу. а 1 - положительному. Дополнительным достоинством этого кода является то, что это обычный тип рабочего кода в ЭВМ. Кроме того, смещенный код легко преобразуется в дополнительный код, даже более распространенный при выполнении цифровых вычислений, у которого к тому же нулевой аналоговый сигнал представлен только одним значением цифрового слова. Хотя в смещенном коде слово 0000 при вычислениях не используется, оно необходимо при контроле правильности работы соответствующего прибора. Применение смещенного кода существенно усложняет то, что главный кодовый переход из 1000 в 0П1 расположен в области нуля десятичного числа. Это приводит к существенному снижению быстродействия приборов при контроле малых по амплитуде сигналов, а также большой дифференциальной нелинейности. Недостатком смещенного кода является и то, что по сравнению с прямым кодом обычно значительно больще погрешность смещения нуля. Дополнительный код получается из прямого инвертированием цифрового слова и добавлением к результату единицы в старшем разряде. Например, чтобы перейти от числа ЮП а прямом коде получим вначале 0100, а затем, прибавив 0001, получим то же число в дополнительном коде в виде 0101. Такая процедура перехода из одного кода в другой иногда является предпочтительной при вычислениях для замены операции сложения вычитанием или наоборот. Внимательно проанализировав смещенный и дополнительный коды, нетрудно заметить, что один переходит в другой путем инверсии значения первого разряда (см. табл. 5.2). И, наконец, последним, достаточно широко распространенным кодом является обратный. Этот код получается из прямого путем инверсии значащих разрядов для отрицательных чисел. Коды положительных чисел у них совпадают. Недостатками этого кода являются двойственное представление нулевого значения и более сложная аппаратурная реализация узлов при переходе от цифровой к аналоговой форме представления сигнала. 5.3. ПЕРЕДАЧА АНАЛОГОВЫХ СИГНАЛОВ ПО ДЛИННЫМ ЛИНИЯМ СВЯЗИ Для передачи с высокой точностью аналоговых сигналов по линиям связи, длина которых достигает 10 и даже 1000 м, используются специальные методы и схемы. Передача аналоговых сигналов по проводам на большие расстояния обычно требуется при дистанционном управлении различными исполнительными устройствами в современном роботизированном производстве. Исполнительные устройства строятся на базе различных электродвигателей или электромагнитно-механических приборов, управляемых аналоговыми сигналами. При этом существует два подхода к организации дистанционного управления; либо непосредственно передать аналоговый сигнал, либо преобразовать аналоговый сигнал в цифровой, передать цифровой сигнал по витым парам проводов и на месте преобразовать его вновь в аналоговый сигнал, усилив последний до требуемой мощности. Метод непосредственной передачи аналоговых сигналов сравнительно больш'Ой мощности предпочтителен тогда, когда допустимо некоторе ухудш'ение точности при приеме сигнала исполнительным устройством и требуется максимальная простота и дешевизна линии связи (включая схемы передатчика и приемника сигнала). Если же потеря точности в линии связи недопустима, второстепенным являются требования к стоимости линии связи и допустила аппаратурная избыточность в схемах приемника и передатчика, то вместо аналоговых сигналов применяют передачу эквивалентных им цифровых сигналов. Такая цифровая передача сигналов особенно предпочтительна при очень длинных линиях связи (более 10 м) в условиях повышенных электромагнитных помех. Обычно применяют два метода цифровой передачи аналоговых сигналов. Один из методов заключается в том, что аналоговый сигнал преобразуется с помощью АЦП в цифровое слово. Параллельный код на выходе АЦП преобразуется в последовательный и в сопровождении тактовых импульсов передается по двум витым парам проводов к приемнику исполнительного устройства. Здесь,* наоборот, последовательный код цифрового слова^ преобразуется в параллельный, затем с помощью ЦАП в аналоговый сигнал и после этого усиливается до мощности, требуемой для управления исполнительным устройством. Во втором методе цифровой передачи аналоговых сигналов применяются преобразователи напряжения в частоту и обратно (см. гл. 9 и 11). Передатчик преобразует аналоговый сигнал в частоту, усиливает последовательность цифровых сигналов с переменной частотой до требуемой мощности и передает их в линию. Приемник сигналов с линии формирует поступающие сигналы и преобразует переменную их частоту в напряжение или ток, которые затем усиливаются до мощности, необходимой для управления исполнительным устройством. Последний метод цифровой передачи аналоговых сигналов требует меньших аппаратурных затрат, поскольку в качестве преобразователя в передатчике и приемнике может быть использована одна микросхема КР1108ПП1 и можно обойтись без преобразователей параллельного кода в последовательный и наоборот (см. § 10.1). Более того, здесь необходима только одна пара витых проводов. Ниже рассмотрены некоторые схемы усилителей мощности для исполнительных устройств, которые могут быть использованы и в качестве передатчиков аналоговых и цифровых сигналов, работающих на длинные линии. При такой передаче аналоговых сигналов возникают существенные трудности, обусловленные неидеальностью параметров протяженной линии связи. Во-первых, витая пара проводов имеет существенные значения сопротивления и распределенных емкости и индуктивности. Кроме того, на разных кон-, цах линии связи в местах соединения ее с общими точками приборов может возникать разность потенциалов до нескольких сотен 1;вольт. Чтобы уменьшить действие этих факторов могут использо-ваться трехпроводные линии связи, в которых к передатчику си- гнала от приемника подводятся не только общий и сигнальный провода, но и провод напряжения питания. Для уменьшения числа проводов до двух в качестве передатчиков аналоговых сигналов обычно применяют схемы, в которых провод напряжения питания объединен с сигнальным. В этом случае второй провод подключается не к общей точке приемника, а ко входу приемника со входным сопротивлением R . В схеме передатчика должен использоваться плавающий источник сигнала Ur, например термопара или резисторный мост с терморезисторами. При передаче напряжения по длинной линии возникают ошибки из-за падения напряжения на приводе. Чтобы уменьшить потери, необходимо либо увеличить сечение провода, либо выбрать провод с малым удельным сопротивлением. И то, и другое неприемлемо, поскольку в первом случае увеличивается вес линии связи, а во втором случае - ее стоимость. Поэтому полезный сигнал в^линии связи представлен не напряжением, а током. Благодаря этому в линии связи можно использовать не коаксиальный кабель с нормированным сопротивлением, а витую пару проводов, имеющую значительные разбросы сопротивления. Но и в этом случае требуется согласовать выходное сопротивление Rr источника тока с сопротивлением линии R . Простое подключение к выходу источника тока сопротивления Rb = R;, обычно недопустимо, так как вдвое уменьшается полезный сигнал в линии. Поэтому, чтобы выполнить согласование, в схему вводят ОУ, охватывающий отрицательной ОС источник тока с согласующим сопротивлением [35]. Этот ОУ устанавливает напряжение на Rh равным входному независимо от сопротивления Rh- Ниже описаны схемы универсального и прецизионного передатчиков. В универсальном передатчике (рис. 5.1) плавающее питание ОУ организовано с помощью цепи стабилитронов VD2-VD4. В этой схеме работа на витую пару проводов обеспечивается ОУ, который создает в цепи нагрузки R ток в зависимости от Ubx-Операционный усилитель включен по схеме неинвертирующего усилителя с эмиттерным повторителем на выходе. Ток через тран- 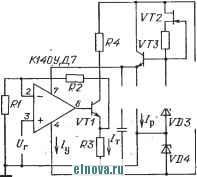 Рис. 5.1. Схема усилителя сигнала в двухпроводной линии связи 1 ... 12 13 14 15 16 17 18 ... 38 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||