
|
| |
|
|
Главная » Книги и журналы 1 2 3 4 ... 30 электрические аппараты Электрическим аппаратом принято называть электротехническое устройство, предназначенное для управления электрическими и неэлектрическими объектами, а также для защиты этих объектов при ненормальных режимах работы. Понятие электрический аппарат охватывает очень обширный круг бытовых и промышленн1х устройств. Настоящий учебник относится в основном к электрическим аппаратам, обслуживающим электроустановки по производству (электростанции), преобразованию и распределению (электрические сети и подстанции), потреблению (электрический привод) электрической энергии в народном хозяйстве. Многообразие самих аппаратов и выполняемых ими функций, совмещение в одном аппарате нескольких функций не позволяют строго классифицировать их по одному какому-то признаку Представляется целесообразным рассмотреть их по назначению - основной функции, выполняемой аппаратом. в этом случае они могут быть подразделены на следующие группы Коммутационные, основное назначение которых - включать и отключать электрические цепи. Сюда можно отнести разъединители, выключатели высокого и низкрго напряжения (автоматические и неавтоматические), рубильники, переключатели и т. д. Защитные, основное назначение которых - защита электрических цепей от токов короткого замыкания и перегрузок. Сюда относятся предохранители высокого и низкого напряжения. Ограничивающие, назначение которых - ограничение токов короткого замыкания (реакторы) и перенапряжений (разрядники) Пускорегулирующие, предназначенные для управления электроприводами и другими промышленными потребителями электроэнергии Сюда относятся контакторы, пускатели, силовые и командные контроллеры, реостаты и др. Контролирующие, основное назначение которых - контроль заданных электрических и неэлектрических параметров Сюда относятся реле и датчики. Регулирующие, предназначенные для автоматической непрерывной стабилизации или регулирования заданного параметра электрической цепи или системы. в пределах одной группы или типа аппараты различаются 1) по напряжению - низкого напряжения (обычно до 660 в включительно), высокого напряжедия (от 1000 в и выше), 2) по роду тока - постоянного тока, переменного тока промышленной частоты, переменного тока повышенной частоты; 3) по роду защиты от окружающей среды - в исполнениях открытом, защищенном, брызгозащищенном, водозащищенном, герметическом, взрывобез-опасном и т.д.; 4) по способу действия - электромагнитные, магнитоэлектрические, индукционные, тепловые и т.д.; 5) по ряду других факторов (быстродействие, способы гашения дуги и т. п). По принципу работы электрические аппараты могут быть подразделены на контактные и бесконтактные. Первые имеют подвижные контактные части, и воздействие на управляемую цепь осуществляется путем замыкания или размыкания этих контактов. Бесконтактные аппараты не имеют коммутирующих контактов. Эти аппараты осуществляют управление путем изменения своих электрических параметров (индуктивность, емкость, сопротивление и т. д.). Контактные аппараты могут быть автоматические и неавтоматические. Автоматические - это аппараты, приходящие в действие от заданного режима работы депи или мащины. Неавтоматические - это аппараты, действие которых зависит только от воли оператора. Они могут управляться дистанционно или непосредственно (рукой, ногой) 1-2. ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ЭЛЕКТРИЧЕСКИМ АППАРАТАМ Требования, предъявляемые к электрическим аппаратам, чрезвычайно разнообразны и зависят от назначения, условий применения и эксплуатации аппарата. Кроме специфических требований, относящихся к данному аппарату, все электрические аппараты должны удовлетворять некоторым общим требованиям: 1. Каждый электрический аппарат при работе обтекается каким-то рабочим током, при этом в токоведущих частях выделяется определенное количество теплоты и аппарат нагревается. Температура не должна превосходить некоторого определенного значения, устанавливаемого для данного аппарата и его деталей. 2. В каждой электрической цепи может быть ненормальный (перегрузка) или аварийный (короткое замыкание) режим работы. Ток, протекающий по аппарату в этих режимах, весьма заметно (в 50 и более раз) превышает номинальный, или рабочий, ток. Аппарат подвергается в течение определенного времени чрезмерно большим термическим и электродинамическим воздействиям тока, однако он должен выдерживать эти воздействия без каких-либо деформаций, препятствующих дальнейшей его работе. 3. Каждый электрический аппарат работает в цепи с определенным напряжением, где возможны также и перенапряжения. Однако электрическая изоляция аппарата должна обеспечивать надежную работу аппарата при заданных значениях перенапряжений. 4. Контакты аппаратов должны быть способны включать и отключать все токи рабочих режимов, а многие аппараты - также и токи аварийных режимов, которые могут возникнуть в управляемых и защищаемых цепях 5. К каждому электрическому аппарату предъявляются те или иные требования по надежности и точности работы, а также по быстродействию. 6. Любой электрический аппарат должен по возможности иметь наименьшие габариты, массу и стоимость, быть простым по устройству, удобным в обслуживании и технологичным в производстве. 1-3. ОСНОВНЫЕ МАТЕРИАЛЫ, ПРИМЕНЯЕМЫЕ В АППАРАТОСТРОЕНИИ Материалы, применяемые в аппаратостроении, могут быть разбиты на следующие группы: 1) проводниковые - главным образом медь, сталь, алюминий, латунь и др.; 2) магнитные - различного рода стали и сплавы - для магнитопроводов; 3) изоляционные - для электрической изоляции токоведущих частей друг от друга и от заземленных частей; 4) дугостойкие изоляционные - асбест, керамика, пластмассы - для дуго-гасительных камер; 5) сплавы, обладающие высоким удельным сопротивлением для изготовления различных резисторов; 6) контактные - серебро, медь, металлокерамика - для обеспечения высокой электрической износостойкости контактов; 7) биметаллы - применяются в автоматических аппаратах, использующих линейное удлинение различных металлов при нагревании током; 8) конструкционные - металлы, пластмассы, изоляционные материалы - для придания аппаратам и их деталям тех или иных форм и для изготовления деталей, преимущественным назначением которых являются передача и восприятие механических усилий. Технический прогресс в аппаратостроении в значительной степени зависит от качества перечисленных материалов. ГЛАВА Основы расчета электродинамических сил 2-1. ОСНОВНЫЕ понятия Обтекаемый током i прямолинейный проводник длиной / (рис. 2-1, а), расположенный в магнитном поле с индукцией В, испытывает механическую силу F = i7Bsinp, (2-1) где р - угол между направлением вектора магнитной индукции и направлением тока в проводнике. 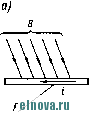 © 
 Рис. 2-1. К определеницо электродинамической силы между двумя проводниками Для системы из нескольких обтекаемых током проводников можно всегда представить, что любой из этих проводников расположен в магнитном поле, созданном токами других проводников, и соответствующим образом взаимодействует с этим полем, т.е. между проводниками, охваченными общим магнитным потоком, всегда возникают механические силы. Эти силы называются электродинамическими. Аналогичные силы возникают между проводником, обтекаемым током, и ферромагнитной массой. Направление действия силы определяется правилом левой руки . Направлеше действия силы может быть также онределено из следующего общегф положения: силы, действующие в контуре с током, стремятся изменить конфигу1Ицйю контура так, чтобы охватываемый контуром магнитный поток увеличился. Ресьма удобным для определения направления действия электродинамической силы является метод, предложенный акад. В. Ф. Миткевичем, основанный на представлении бокового распора и тяжения магнитных линий. Рисуют и накладывают друг на друга картины магнитных полей, создаваемых током каждого из проводников. Благодаря боковому распору магнитных силовых линий сила, действующая на проводник, направлена в сторону, где поле ослаблено (рис. 2-1, г). При нормальных эксплуатационных условиях электродинамические силы, как правило, малы и не вызывают каких-либо деформаций, а тем более поломок деталей в аппаратах. Однако при коротких замыканиях эти силы достигают весьма больщих значений и могут вызвать деформацию или разрушение нё только отдельных деталей, но и всего аппарата. Это обстоятельство требует проведения расчета аппарата (или отдельных его узлов) на электродинамическую устойчивость, т.е. на способность выдержать без повреждений прохождение наибольшего возможного в эксплуатационных условиях (или заданного) тока сороткого замыкания. Такой расчет тем более необходим ввиду того, что с целью получения минимальных габаритов в аппаратах стремятся располагать токоведущие части как можно ближе друг к другу. 2-2. МЕТОДЫ РАСЧЕТА ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ Расчет электродинамических сил ведется обычно либо на основании закона взаимодействия проводника с током и магнитным полем (первый метод), либо по изменению запаса магнитной энергии системы (второй метод). Расчет электродинамических сил на основании закона взаимодействия про-водиика с током и магнитным полем. Возьмем систему из двух произвольно расположенных проводников 1 и 2 (рис. 2-1,6), обтекаемых токами ij и ij. Напряженность магнитного поля, создаваемого элементом dy проводника 2 в месте расположейия элемента dx проводника 1, будет dH = -sma, (2-2) где а - угол между вектором р и направлением тока по элементу dy. Весь проводник 2 создаст в месте расположения элемента dx напряженность магнитного поля sin а. (2-3) Элементарная сила, действующая на элемент dx, обтекаемый током ij, dF = p-HiJt dx sin p = ii dx sin p -sina, (2-4) где P - угол между вектором магнитной индукции В = ЦоЯ^ и вектором тока i; Цо - магнитная проницаемость воздуха. Полную силу F взаимодействия между проводниками 1 и 2 получим после интегрирования dFj, по всей длине проводника 1: Udxsinpfilsina. (2-5) 47Г il il 1г Считая токи il и неизменными по всей длине проводника, уравнение (2-5) можно переписать в виде произведения членов: 10 \/ F = hiz 4п dxsinp -4-sin а у (2-6) Vl 12 / Первый член этого выражения зависит только от значений токов. Второй член зависит только от взаимного геометрического расположения проводников и представляет собой безразмерную величину. Эту величину часто называют коэффициентом контура, который обозначим буквой с. Тогда F = chh-, (2-7) т.е. сила взаимодействия между двумя проводниками, обтекаемыми токами Il и пропорциональна произведению этих токов (квадрату тока при Il = Ij) и зависит от геометрии проводников. Подставив в (2-7) значение цо = 47Г-10 и вычисляя силу в ньютонах, получим F = 10-iii2C. (2-8) Расчет электродинамических сил по изменению запаса электромагнитной энергии контуров. Электромагнитное поле вокруг проводников и контуров с током обладает определенным запасом энергии. Электромагнитная энергия контура, обтекаемого током i, W=L. (2-9) Электромагнитная энергия двух контуров, обтекаемых токами ij и ij, W=L, + L2 + Mhh, (2-10) где Ll, La - индуктивности контуров; М - взаимная индуктивность контуров. Всякая деформация контура (изменение расположения отдельных его элементов или частей) или изменение взаиморасположения контуров приводят к изменению запаса электромагнитной энергии. При этом работа сил в любой системе равна изменению запаса энергии этой системы: Fdx = dW, (2-11) здесь dW- изменение запаса энергии системы при деформации системы в направлении X под действием силы F. На указанном законе (2-11) и основан второй метод определения электродинамических сил в контурах. Электродинамическая сила в контуре или между контурами, действующа в направлении х, равна скорости изменения запаса энергии системы при деформации ее в том же направлении: Согласно сказанному, электродинамическая сила в контуре, обтекаемом током 1, f dL ~ 2 (2-13) а электродинамическая сила между двумя взаимосвязанными контурами с токами ii и iz будет 2 dx 2 dx 1 .2 , ,. . dM (2-14) 2-3. ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ Возьмем два параллельных круглых проводника 1 и 2 (рис. 2-1, в), расположенных в одной плоскости на расстоянии а друг от друга и обтекаемых токами ii и Расчет будем производить первым методом. Проделав все операции аналогично (2-2)-(2-8) и учитывая, что sin р = 1, так как проводники расположены в одной плоскости, и вектор индукции в данном случае перпендикулярен этой плоскости (Р = 90°), получим F=lO-4ii2C, (2-15) где dy . -г- sin а. Выразим подынтегральные переменные второго интеграла через одну из переменных, а именно через угол а. Примем за начало координат элемент dy и направление токов, совпадающее с положительным направлением координат. В этом случае текущая координата 3/ = actga; р = а sin а dy= -aj-j sin a (2-16) Подставив полученные выражения в (2-15) и считая, что проводник 2 распространяется от - оо до -(-оо, чему соответствует изменение угла а от л до О, получим sina , 2 -da = - а а (2-17) Очевидно, если проводник 1 {l,), так же как и проводник 2, распространяется до +00, то с будет стремиться к бесконечности. Если проводник 1 имеет конечную длину, то с = 21/а. (2-18) Согласно (2-8) сила, действующая на проводник 1, равна F = lO-4,i2-. (2-19) 11 У^твнеиие (2-19) определяет силу взаимодействия между двумя проводниками, один из которых бесконечно длинен, а второй имеет конечную длину / И расположен симметрично относительно первого В случае когда оба п{)овод-йика будут иметь конечную длину /, пределы интегрирования для (2-17) будут уже не от л до О, а от 2 до 1 (см штриховые линии на рис 2-1, в) и сила взаимодействия между двумя круглыми проводниками конечной и равной длины определится уравнением F= 10- ilia (2-20) 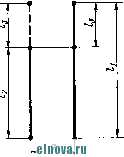 Рис 2-2 К определению электродинамической силы между параллельными проводниками неравной длины Рис 2-3 К определению электродинамической силы графическим методом В (2-20) множитель перед скобкой представляет собой силу взаимодействия между двумя проводниками, один из которых имеет бесконечную длину Обозначим эту силу через Коэффициент, заключенный в скобках, представляет собой величину, меньшую единицы При а/1 < 0,2 (в практике, как правило, а/1 < 0,2) величиной (а/Г) по отношению к единице можно пренебречь Тогда уравнение (2-20) примет вид F= 10- г,1 а (2-21) В практике весьма часто проводники имеют неравную длину Силу взаимодействия между такими проводниками можно найти изложенным выше способом, произведя интегрирование каждый раз в соответствующих пределах Можно эту задачу решить, применив уравнение (2-20) На рис 2-2 приведены два проводника неравной длины /i и /г, расположенные друг от друга на расстоянии а и обтекаемые токами ii и ij Нарастим проводник I2 на отрезок 1 до длины, равной li Проводник /i можем также представить состоящим из двух отрезков I2 и /3 Тогда можем написать, что сила взаимодействия между проводниками длиной /1 и I2 (Fiiig) равна сумме сил взаимодействия между двумя проводниками I2 одинаковой длины (Fji) и двумя проводниками длиной I2 и I3 (Fjj) Fhh = Р'22 + F2h (2-22) Аналогично можно написать Сложив уравнения (2-22) и (2-23), получим Ph>2-Phh + P>22-P>3b (2-24) Таким образом, сила взаимодействия между двумя проводниками неравной длины выражается через силу взаимодействия проводников равной длины 12=у(г'г + <22-з'з) (2-25) При этом /i и /г - величины заданные, а h = h - h Сила взаимодействия между параллельными круглыми проводниками может быть также определена по изменению запаса электромагнитной энергии Первый случай - оба проводника принадлежат к одной системе Индуктивность системы из двух параллельных проводников радиусом г и длиной и находящихся на расстоянии а, при условии, что / > а, определяется формулой [24] L = 4/( 1пу-1-0,25 (2-26) Нас интересует сила, действующая в направлении а Согласно (2-13) (2-27) 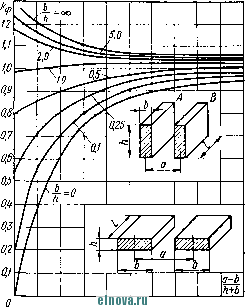 02 0,11- Off 0,8 1,0 1,2 f,k 1,6 1,8 2,0 Рис 2-4 Зависимость коэффициента от размеров проводников из (2-26) тогда dL da F=10-yi -=10-V - (2-28) Из (2-28) видно, что результат получился таким же, как при определении этих сил первым методом Второй случай - проводники принадлежат к двум различным системам, при этом сами системы не претерпевают деформации Взаимная индуктивность между двумя проводниками длиной /, находящимися друг от друга на расстоянии а, при условии, что / > а, определяется формулой М = 2/(1п~-Л (2-29) \ а ) Согласно (2-14) сила, действующая в направлении а, 1 dL. 1 , dL. dM F = - h -1--г -1--h hh 2 da 2 da da здесь da da так как сами системы не претерпевают деформации, а из (2-29) dM 2Л da а Тогда F= 10-JiJ2-, (2-30) а т.е. результат, как и следовало ожидать, получился тот же. Для двух параллельных проводников, расположенных с любым сдвигом, Г. Б. Холявский [31] получил удобную для расчетов коэффициента контура формулу, основанную на геометрической интерпретации приведенных выше уравнений. Величина ] + представляет собой длину диагонали D (рис. 2-3, а) прямоугольника со сторонами / и а; следовательно, согласно (2-20) для проводников равной длины с.1<, (2.31а, а а согласно (2-25) для проводников неравной длины (рис. 2-3,6) DD2-a s-a\ а а а J т.е. коэффициент контура равен разности суммарных диагоналей и боковых сторон четырехугольника (прямоугольник, трапеция, параллелограмм), построенного на данных отрезках проводников, деленной на его высоту. Аналогичную, но более сложную интерпретацию можно получить и для перпендикулярно расположенных проводников. Приведенные выше уравнения справедливы для проводников круглого и трубчатого сечений, для которых можно считать, что ток протекает по их геометрической оси. Для проводников прямоугольного сечения (шин) следует вводить поправочный коэффициент - коэффициент формы /сф, зависящий от размеров проводников и расстояний между ними (рис. 2-4)- F=\Q-\,i2k (2-32) 2-4. ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМИ ПРОВОДНИКАМИ На рис. 2-5 приведены часто встречающиеся в аппаратах формы перпендикулярно расположенных проводников, например в рубильниках, мостиковых контактных системах и многих других аппаратах и узлах. Произведя расчеты, аналогичные предыдущим (первый метод), получим следующие выражения Для сил, действующих на проводник / 1 2 3 4 ... 30 |