
|
| |
|
|
Главная » Книги и журналы 1 ... 4 5 6 7 8 9 10 ... 35 (рис. 5.2); в качестве частотно-независимого резистора выбирают непро-волочньЕе резисторы типов С2-10, С2-34, УЛИ, БЛП и др. Метод позволяет измерять частотные погрешности величиной от 0,1% и выше. 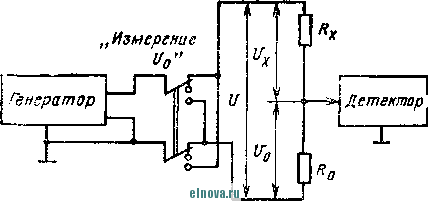 \ напряжения Измерение Рис. 5.2. Схема измерения частотной погрешности резисторов. В практике измерения реактивных параметров резисторов часто используют измереине их постоянной времени, для чего применяют стандартные приборы, приведенные в табл. 5.12. Таблица 5.12 Приборы для измерения постоянной времени резисторов
Примечание. Время измерения прибором Р5058 ие более 0,2 с, 5.6. ИЗМЕРЕНИЕ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПЕРЕМЕННЫХ РЕЗИСТОРОВ Измерение фактического значения разрешающей способности А проволочных резисторов может быть выполнено несколькими способами. При измерениях во время вращения движка резистор подключают со стороны входа к источнику питания, а к выходу резистора подключают дифференцирующую /С-цепочку с постоянной времени, определяемой нз выражения Тр =з 5- (3-ь5) где /в - время перемещения контакта от витка до витка. с выхода дифференцирующей цепочки импульсы, характеричх'ю-шне рачре]иа10щуюспособность, через усилитель подаются на счстчикС и шлейфоьый осциллограф ШО (рис, 5.3), .4 2 > Рис. 5.3, Схема качественной оценки разрешающей способности переменных резисторов. Данный способ позволяет произвести качественную оценку разрешающей способности. Для получения результатов измерения непосредственно в единицах А во всем диапазоне угла поворота используют схему рис, 5.4.
>
Рис. 5.4. Схема измерения разрешающей способности переменных резисторов. Отличие ее состоит в том, что импульсы с усилителя подают на схему отношений, с выхода которой получают сигнал V, пропорциональный разрешающей способности резистора: где k - постоянный коэффициент. После усиления выходных импульсов схемы отношений они поступают на расширитель, который увеличивает их длительность, сохраняя при этом их амплитуду. Расширенные импульсы интегрируются и подаются на регистрирующий прибор, шкала которого проградуиро-вана в единицах разрешающей способности. В рассмотренных схемах для исключения дополнительной погреш-посги измерений к входному сопротивлению усилителя R предъявляется требование RRm, где Rj - эквивалентное сопротивление шумов перемещения подвижной системы. Сопротивление оказывается включенным последовательно с емкостью С и сопротивлением Rj поэтому при несоблюдении указанного условия прибор будег вместе с разрешаю-нтен способностью регисгрировать шумы перемещения. Для прецизионных измерений может применяться метод статической оценки разрешающей способности в установленной или в ряде установленных точек. Измерение осушествляют с помощью компенсаторов (рис. 5.5), имеющих необходимио разрешающую способность по напряжению. Проводят их в два этапа. Устанавливают движок резистора в необходимую точку, уравновешивают компенсатор и делают первый отсчет. Затем дают самое малое приращение по углу поворота подвижной системы, что определяют по изменению (минимальному) показания индикатора потенциометра, затем снова уравновешивают компенсатор и делают второй отсчет.
Рис, 5.5, Схема измерения разрешающей способности переменных резисторов в уста* новленной точке. Величина разрешающей способности определяется по формуле Д разность показаний компенсатора при втором и первом отсче-напряжение на входе резистора. где лентах; f/вх . По серии подобных замеров строят график зависимости Д с= / (а), 5.7. ИЗМЕРЕНИЕ ШУМОВ ВРАЩЕНИЯ Методы измерения шумов вращения и рекомендуемые принципы построения измерительной аппаратуры нормированы ГОСТ 21342.6-75. Стандарт устанавливает два метода измерений шумов вращения переменных непроволочных и проволочных резисторов: метод измерения напряжения шумов вращения; метод измерения эквивалентного сопротивления шумов вращения. Измерение напряжения шумов вращения производится по схеме, показанной на рис. 5.6. Ист&чнин постоянного тона 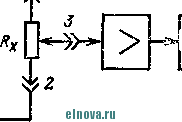  Рис. 5.6, Схема измерения напряжения шумов вращения. Измеряемый резистор входом подключается к источнику питания постоянного тока по потенциометрической схеме, а с выхода его напряжение подается на усилитель. Выходное напряжение усилителя детектируется и импульсы напряжения регистрируются милливольтметром. Допустимая погрешность метода измерения t25% от измеряемого напряжения шумов. Метод рекомендуется для применения в тех случаях, когда контролируемый резистор предназначен для работы в цепях с протеканием большого тока через выводы 1-2 резистора и незначительного тока через подвижный контакт. Метод измерения эквивалентного сопротивления шумов вращения основан на регистрации отдельных <сскачков> сопротивления ш>мов при превышении ими определенного и установленного заранее уровня. Количество таких нарушений подсчитывают и по этой информации судят о качестве резистора. Рекомендуемая схема измерения показана на рис. 5.7. истсчнин постоянного тепа 
 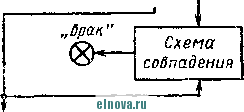 Пороговая скема ОбоыУ Рис. 5.7. Схема измерения эквивалентных сопротивлений шумов вращения. Измеряемый резистор подключен к источнику постоянного тока по реостатной схеме через выводы 1 \\ 3. С выхода 2 и 3 импульсы напряжения, пропорциональные скачкам контактного сопротивления, т. е. сопротивлению шумов вращения, подаются в два канала: канал регистрации импульсов и канал регистрации обрыва цепи резистора. В верхнем (по схеме) канале импульс напряжения через делитель, переключающий диапазоны измерения, и усилитель попадает иа вход пороговой схемы, которая производит сравнение его уровня с установленным. При превышении входным сигналом заданного порога на выходе схемы вырабатывается сигнал, который через расширитель поступает на вход схемы совпадения, в результате чего загорается лампочка с надписью Брак . Нижний канал в этом случае не срабатывает. При обрыве цепи подвижный контакт - резистпвный элемент срабатывает пороговая схема <нижнeгo канала, в результате чею загорается лампочка с надписью Обрыв , а на вход схемы совпадения поступает Запрет иа ее срабатывание. Методическая погрешность измерений может достигать величины :izlO% 5 8. И^МРРРНИЕ УРППНЯ CORCTBFHHbK ШУМОВ В прак1икс .[змерений уровня соСсшенныч ш>мов нснроьолочньгх рези-торов в зависимости от того, какая погрешность измерений дон\-стима, применяют два метода, описанных в ГОСТ 21342.19-78 - sto метод косвенного измерения и метод сравнения. Метод косвенного измерения заключается в предварительном измерении напряжения шумов на испытуемом резисторе и последго-щем вычислении суммарной ЭДС тепловых и токовых шумов при пнга-нии резистора от источника постоянного напряжения. Измерение производится по схеме, приведенной на рис. 5.8, где Rx - измеряемый ре-знсго^; R - специальный разделительный резистор. питания Детентор  Рис. 5,8. Схема измерения шумов косвенным методол!. Снимаемое с измеряемого резистора напряжение шумов подается иа вход усилителя, параметрам которою придается важное значение ввиду зависимости результата измерений от входного сопротивления и полосы его пропускания. Измерения производятся в полосе частот 60-6000 Гц. Высокие требования предъявляются также к источнику постоянного напряжения в части допустимого уровня его шумов, допустимых н>льсацнй и стабильности выходного напряжения. Погрешность метода измерений составляет it20%. В основе второго метода лелсит принцип сравнения напряжения шумов на испытуемом резисторе с образцовым напряжением переменною TOKd. Измерения производят по схеме, привелстпюй на рис, 5.9,
Шидробоч- шй источник перемеито Рис. 5.9. Схема измерения шумов методом сравнения. Перед проведением измерений показания прибора калибруют от специального источника переменного тока напряжением 0,6-0,7 мВ с частотой 1000 .t20 Гц. Источник подключают в схему через специал.,-ный калибровочный резистор R сопротивлением 1 Ом и но показаниям выходного вольтметра подбирают необходимый коэффициент усиления усилителя, I с целью учета влияния шумов входного устройства системы на результат измерений определяют их величину при отключенных источниках питания. После проведения предварительных измерений подключают источник питания постоянного тока и измеряют величину суммарных шумов. Уровень шумов Д определяется из выражения Д,=--Т-Г (T-~S)-hJ. где Т - измеренные суммарные шумы, дБ; /V - напряжение источника постоянного тока, дБ; F {Т ~ S) - поправочный коэффициент (определяется из приложения 2 ГОСТ 21342.19-78). Этот метод благодаря применению калибровки имеет погрешность измерения не более :tlO%. Аппаратура для измерения собственных шумов резисторов приведена в табл. 5.13. 5.9. ИЗМЕРЕНИЕ ПЕРЕХОДНОГО СОПРОТИВЛЕНИЯ Значение переходного сопротивления переменного рсзисюра подвижный контакт - резистивный элемент может быть измерено как в Отдельных точках угла поворота, так и во всем его диапазоне. В практике измерений чаще всего применяют схему, показанную на рис. 5.10 (резистор Rx представлен эквивалентной схемой). 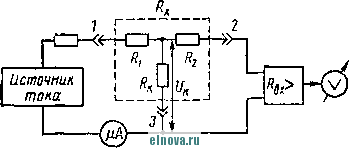 Рис. 5.10. Схема измерения переходного сопротивления. Измеряемый резистор выводами / и 5 подключается к источнику стабильного тока. На переходном сопротивлении контакта от протекающего тока образуется напряжение С/к пропорциональное значению переходного сопротивления, которое через часть измеряемого сопротивления подается на вход усилителя и далее на вольтметр. Сопротивление /?2 вносит погрешность в результат измерения, которая оценивается выражением Ri + R При достаточно большом входном сопротивлении усилителя, порядка Явх (10 -7- 50) Яз, что вполне осуществимо с помощью современной полупроводниковой техники, эта погрешность становится небольшой и общая методическая погрешность измерений может составлять ±5% и менее. Метод допускает автоматизацию процесса измерения, в этом случае на выходе усилителя может быть поставлен самопнсец. Прборы для измерения шумов резчсторов
при необходимости снижения погрешности измерений к выходу 2 чЗ резистора может быгь подключен компенсатор, ручной или автоматический, обладающий достаточным быстродействием. При использовании компенсатора погрешность б/?к исключается. 5.10. ИЗМЕРЕНИЕ ФУНКЦИОНАЛЬНОЙ ХАРАКТЕРИСТИКИ Для измерения функциональных характеристик применяют методы проверки по напряжению и по сопротивлению, которые в свою очередь разделяются иа методы непрерывного измерения и методы измерения в отдельных точках. Часть методов и основные требования к организации измерений изложены в ГОСТ 21342.3-75. Метод проверки по напряжению. Резистор подключают к источнику напряжения так, как это показано на рис. 5.11, 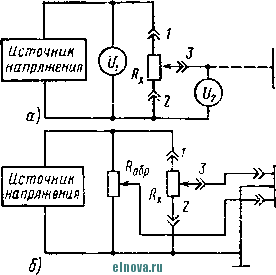 Лепипельное успроиство Вхси бер'пиальной Осцаппограф 8ход горизонтальной развертки Рис. 5Л1. Схема измерения функциональной характеристики. При измерении по точкам (рис. 5.11, а) замеряют значение напряжения питания резистора Ui и напряжения U2 не менее чем в семи точках. Подвижный контакт резистора перемещают с помощью делительного устройства. Результаты измерений напряжений в точках, выраженные в процентах от поданного напряжения, сравнивают с расчетными значениями и определяют погрешность. При измерении непрерывным способом напряжение с измеряемою резистора подают на вертикальный вход осциллографа, а на его горизонтальный вход подают напряжение с выхода образцового резистора (Яобр)) как показано на рис. 5.11, б. Образцовый резистор должен име1Ь линейную зависимость функциональной характеристики. Входы резисторов подключают к источнику напряжения, а подвижные контакты синхронно перемещают. На экране осциллографа во время их перемещения возникает линия, характеризующая функциональную зависимость резистора. Оценку ее производят по сравнению с допустимыми пределами, которые предварительно наносятся на экран осциллографа. Метод проверки по сопротивлению аналогичен описанному выше методу по точкам с той разницей, что с помощью омметра измеряется полное сопротивление резистора между выводами / и 2, а затем сопро- (гирление между выводами 2 п 3 в различных точках, число которых также должно быть ие менее семи. Обработку результатов проводит аналогично вышеописанному способу. Метод измерения в схеме моста. Этот метод применяется в практике прецизионных измерений, преимущественно проволочных резисторов. Измерения производят как по точкам, количество которых может достигать 100 и более, так и при непрерывном неремещении подвижное системы. Измеряемый резистор включается в мостовую схему (рис. 5,U-/ источник тпрйшсний Усгпройстдо леремецетя г г-н Рис. 5.!2. Схема измерения функциональной характеристики мостовым методом, Мостовая схема имеет сопротивления Rq и Як предназначенные для корректировки соответственно начала и конца характеристики резистора. Выходное напряженнее индикаторной диагонали моста, пропорциональ^ ное функциональной Погрешности, подается на вход усилителя и сего ныхода фиксируется вольтметром. Вместо усилителя иногда применяют) компенсационные устройства. Метод измерения в схеме компенсатора. Эта схема (рис. 5.13) аналогична рассмотренной выше, но имеет два рабочих контура. Уравновешивание контуров производится в начале н конце характеристики резистора с помощью сопрошвлений Rq и соответственно, В осталь- ном свойства обеих схем одинаковы. источник напряжения л источник напртения Устроистдо перемещения Рис. 5,13. Схема измерения функциональной характеристики нотеициометрпческим методом. Рассмотренные схемы широко применяются и Д01ЮЛНЯ10Т друг дру1а при измерениях сопротивлений с различными номинальнымн значениями. 5.11. ИЗМЕРЕНИЕ МОМЕНТА ВРАЩЕНИЯ Измерение производится в соответствии с требованиями, изложенными в ГОСТ 21398.3-75. Проверяемый резистор крепят к неподвижной опоре, а к подвижной системе ею прикладывают и измеряют макси-м .льиый и минимальный моменты врашеиия. Проверку осуществляют при перемещении подвижной системы за один цикл. Так как минимальный и максимальный допустимые моменты, как правило, значительно отличаются друг от друга, например 5 и 500 г/см, ю проверку осуществляют в два Этапа. Проверка максимального момента вращения. Для проверки собирают приспособление, схематично показанное на рис. 5.14. 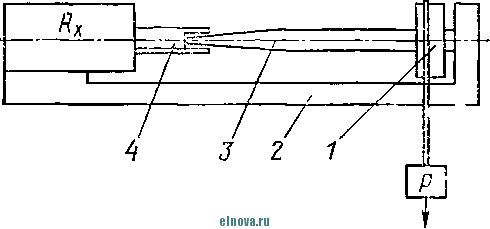 Рис. 5.14. Схема измерения максимального момента вращения. i - шкив с закрепленным на нем грузом Р, 2-основание, 3-отвертка, 4 - вал измеряемого резистора. К подвижной системе резистора (4) прикладывают момент М М яр.макс где R - радиус диска (по ободу), к которому подвешен груз с массой Р. Измерение проводят, отпуская груз для свободного падения, при Этом в любой точке угла поворота резистора система не должна затормаживаться. В противном случае действительный момент вращения резистора превышает допустимую величину. Проверка минимальною момента вращения производится с помощью специальной пружины, угол закручислния которой градуирован в сд i-Ницах момента вращения. Пружина для удобства пользования может быть встроена в рукоятку отвертки. Измерение момента вращения безынерционным способом. Выше были описаны методы, применяющиеся в настоящее время в практике измерений моментов вращения. Оба метода имеют существенный недостаток, заключающийся в том, что на результаты измерений влияет момент инерции измерительной системы. В последнее время разработан способ и устройство безынерционного измерения, заключающий'я в применении механотрона. Принцип действия устройства показан иа рис. 5.15. Выходной рычаг механотрона подпружинен, и его перемещение, отображаемое на выходном приборе, градуировано в еДишщах момента вращения. Так как перемещения рычага механотрона пе превышают доспей миллиметра, то практически момент инерции всей системы не вли- 1 ... 4 5 6 7 8 9 10 ... 35 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||