
|
| |
|
|
Главная » Книги и журналы 1 ... 18 19 20 21 22 23 24 25 По приведенным формулам можно рассчитать регулировочную характеристику приемника (рис. 10.И). Регулировочную характеристику усилителя, содержащего Пр регулируемых каскадов с коэффициентом усиления К^п и нерегулируемых с коэффициентом усиления Kqu можно рассчитать по формуле /Ср = {КогГ \Крп (t/p)] P. (10.21) Целесообразно сначала определить возможность создания системы АРУ, не включая усилитель в ее цепь. В этом случае коэффициент передачи цепи АРУ равен коэффициенту передачи детектора /Сд АРУ (при совмещенном детектировании /Сару = 1) /Сару = /Сд. (10.22) Максимальное напряжение регулирования, которое можно получить в такой системе АРУ, равно max ~ /Сд А[/вых max* (10.23) По регулировочной характеристике находим соответствующее изменение коэффициента усиления регулируемого каскада (см. рис, 10.11) 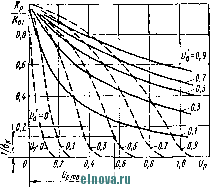 Рис. 10.11. Нормированные регулировочные характеристики однокаскадных усилителей, реализованных по схемам на рис. 10.10, а, б (---) при /Стах Со1 = 1 а 10.10, в (--) при /Стах (о1 = 1. - Kq-JKi mln. (10.24) , де /Со1 - номинальный коэффициент усиления каскада при [Ур = 0; /Cl - минимальный коэффициент усиления каскада при Р Р max- Необходимо оценить также требуемое изменение усиления Оу, которое должна дать система АРУ. Учитывая, что начальный коэффициент усиления регулируемого усилителя /Со р = UJU 8 в x m Im а минимальный /Ср mln = (8 + вых тах)/1/вх max. получаем и вх max Ua Ср mln вх mln (t/e-hBbix шах) (10.25) (10.26) (10.27) Для обеспечения такого изменения необходимо регулировать усиление р каскадов, где Пр = lg(y/lg(k. (10.28) Полученную величину округляем до большего целого. Требуемое число регулируемых каскадов должно быть меньше (10.29) Выполнение этого условия означает, что заданные параметры статического режима АРУ можно получить в неусиленной системе АРУ, регулируя усиление только Пр каскадов. В противном случае в состав АРУ необходимо ввести усилитель. При этом целесообразно охватить цепью АРУ все ранее определенные каскады из числа Пр max: (10.30) Пп = п р max- Требуемое изменение усиления на каскад равно р max/-- 0 = f СГу. (10.31) По регулировочной характеристике каскада можно найти необходимое для получения этого изменения максимальное регулирующее напряжение max- Его можно также рассчитать следующим образом: J / max j\ V Koi 1 Уp max - Уй p 1 (10.32) для схем на рис. 10.10, а, б; ауР-1 для схемы на рис. 10.10, в. Коэффициент усиления цепи АРУ /Сару = Ср. ш8х/Д^вых.шах> w(l0.33) .(10.34) коэффициент усиления усилителя, который необходимо иметь в этой цепи, Ку = /Сару/Сд. (10.35) При проектировании цепи АРУ напряжение задержки выбирается исходя из заданной по ТЗ номинальной стабилизируемой амплитуды сигнала на выходе приемника. Если цепь АРУ подключается непосредственно к выходу приемника, то напряжение задержки, отнесенное ко входу цепи АРУ, равно номинальной стабилизируемой амплитуде выходного сигнала [/в = f/вых 0. (10.36) Если АРУ подключено не к выходу приемника, то напряжение задержки можно определить поформуле t/в = [/вых о Сьых ш (10.37) где /Свых п- коэффициент усиления выходных каскадов, включенных между точкой подключения цепи АРУ и выходом приемника. При этом подразумевается, что глубина модуляции равна 100%. Найденные параметры системы'АРУ, определяющие ее поведение в стационарном режиме при отсутствии амплитудной модуляции сигнала, можно уточнить, учитывая требования к допустимым искажениям модулирующего сигнала и к переходным процессам в системе АРУ, 10.3. РАСЧЕТ ДИНАМИЧЕСКОГО РЕЖИМА СИСТЕМЫ АРУ ПЕРВОГО ПОРЯДКА Системой АРУ первого порядка называется система АРУ, содержащая одну из цепей с постоянной времени, значительно превышающей постоянные времени доугих ее цепей, В такой системе АРУ Рис. 10.12. Схемы инерционных цепей АРУ. инерционной цепью может быть либо детектор, эквивалентная постоянная времени которого превышает постоянные времени других цепей, либо специальный фильтр (рис. 10.12), стоящий после безынерционного детектора. При расчете системы необходимо определить постоянную времени интегрирующей /?С-цепи АРУ Тф и уточнить величины /Сару и Пр, учитывая требования к переходному процессу и допустимые искажения модулирующего сигнала. Исходными данными для расчета АРУ, предназначенной для j приемника амплитудно-модулированных сигналов, являются мак- 406  симально допустимые значения фазового сдвига Фх, изменения глубины модуляции твых/вх и коэффициента нелинейных искажений Kf на минимальной частоте модулирующего сигнала fimin. Из анализа работы АРУ установлено, что фазовый сдвиг огибающей на выходе приемника по сравнению с огибающей на входе, а также нелинейные искажения увеличиваются с ростом интенсивности обратной связи Л^, причем в рассматриваемой системе глубина модуляции всегда уменьшается и тем больше, чем больше Л^. 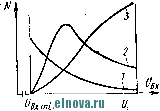 г-,0 i,s 1Л -30 IS - и
Рис. 10.13 Зависимости изменения интенсивности обратной связи N от амплитуды входного сигнала Vs. нис. 10.14. Нормированные характеристики (/!=/(*) при /(max (oi = = 1,5, t;o=0,5 В(--)и i/2=/W при /(шах/Со1 = 1, Vo = 0,1 в (---). Таким образом, наибольшие искажения происходят при максимальной интенсивности обратной связи, поэтому сначала строим зависимость Л' = [/вхруКаРУ, (10.38) где Spy = dKp/dU - крутизна регулировочной характеристики усилителя. В зависимости от формы регулировочной характеристики коэффициент N меняется по-разному при изменении входного сигнала f/вх в динамическом диапазоне (рис. 10.13). При t/вх < [/ х mim при котором начинает работать система АРУ, система разомкнута и = 0. При [/вх > [/вх min коэффициент отличается от 0. Если известно аналитическое выражение регулировочной кривой /Ср ([/р), то можно найти в аналитическом виде и зависимость Л/([/ х). Для регулировочных характеристик (10.17) и (10.18) соответственно (для схем на рис. 10.10, а, б и 10.10, е) N{U ) = KAPy-jf- X
к <Рт /(op £ фт /(n /(oi (10.39) /V(t/Bj = /CAPy max Us \ p L 01 \ KoplBX к >ol 7 V -ll I (10.40) Анализируя нормированные характеристики интенсивностей обратной связи г/ = /V (С/вхУКару в зависимости от нормированной величины входного сигнала х - UxKop/Us (рис, 10.14), можно заметить, что характеристика у^ - f (х) монотонно возрастает и максимальная интенсивность обратной связи имеет место в конце динамического диапазона D при максимальном значении входного сигнала max = ЯдруX
К р . . Фт . /(max Uo Koi j (10.41) Из-за постепенного падения крутизны регулировочной характеристики максимальное значение = f (х) имеет место в начале динамического диапазона при Ug/UxKop = 1 = Кару -~ р --7 . (10-42) . / 5lHaX- . JE31 , V * При кусочно-линейной аппроксимации регулировочной характеристики (рис. 10.15, а) целесообразно применить следующий приближенный способ построения зависимости N (б^вх). Каждый интервал кусочной аппроксимации делим пополам и определяем коэффициент усиления /С„, соответствующий середине этого л-го интер- вала. По приближенной формуле Ubxu - UJKn . (10.43) находим амплитуду входного сигнала Uxn, соответствующую выбранной точке, и крутизну регулировочной характеристики на этом участке Spy . Коэффициент /V для этой точки равен /V = /<Ару t/BxnSpyn- (10-44) По полученным таким образом точкам можно построить (рис. 10.15, б) кривую N (Свх)- 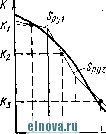 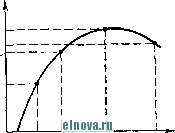 Рис. 10.15. Графики зависимостей /C(t/p) (а) и N{Ubx) {б).  При детальном расчете параметров переходных и стационарных процессов во всем диапазоне изменения амплитуд входных сигналов необходимо определить N для каждого заданного значения амплитуды входного сигнала. В процессе проектирования системы АРУ параметры, обеспечивающие устойчивую работу ее, следует выбирать при максимальном значении коэффициента (f/вх) в заданном диапазоне изменения амплитуд входного сигнала Uвх- Если система АРУ устойчива при сигнале, для которого Ы = /Vmax. то она устойчива и при любых других сигналах. Общее условие для выбора минимально допустимого значения постоянной времени Тф определяется неравенством Ч > Л^тах/ЙтШрп, (10.45) где Рп представляет собой наименьшее из чисел Pi= /1 -(/ вых вх)- Р2 = /С/ и Pз = tgф^. (10.46) Условия (10.45) получены для непрерывной системы АРУ. Учитывая, что для инерционных АРУ практически всегда ТфТ„, эти условия распространены с достаточной для практики точностью и на импульсные системы АРУ. Если в ТЗ на приемное устройство задана длительность переходного процесса в системе АРУ /уу при величине перепадов амплитуд Dn, то максимально допустимое значение постоянной времени цепи АРУ можно выбрать из условия (10.47) 409 Тф < (/уу/2,2) (1 -f /V ). Параметр Ыц соответствует заданной величине перепада = - вхп/вх min амплитуд сигналв относительно минимальной амплитуды сигнала на входе t/вх min. при которой начинает работать АРУ и = 0. Величину Nn находят или графигчески по характеристике N = f (Ubx), или аналитически при Ub = Dni/sx mm- Если в приемном устройстве с АРУ необходимо одновременно сохранить с высокой точностью закон модуляции и обеспечить малое время установления переходных процессов, то одновременно должны быть собдадены условия (10.45) и (10.47): Л'шах <Тф<(1-ЬЛ ). Эти условия могут оказаться невыполнимыми, если (10.48) mln Рп >(1+Л^п)- При этом следует скорректировать расчет стационарного режима, изменив исходные условия, или построить систему АРУ, применив более сложные фильтры (при этом увеличивается порядок уравнения, описывающего систему АРУ). Следует заметить, что переходный процесс системы АРУ первого порядка монотонный, и поэтому требования по ограничению выбросов всегда выполняются. Кроме того, система непрерывного действия всегда устойчива. Для импульсной системы АРУ первого порядка условие устойчивости с учетом необходимого запаса устойчивости {шеет вид Ч>)С (0,5 Л7т,ахГп). (10.49) Коэффициент запаса устойчивости х выбирается с учетом разбросов параметров системы % = 3...4, 00.50) Поэтому постоянную времени импульсной системы АРУ первого порядка с учетом запаса устойчивости и возможного разброса параметров выбирают из условия = 2 Л^, (10.51) Сравнивая условия (10.45) и (10.51), выбирают то из них, по которому получается большая величина Тф. Рассчитанную постоянную времени цепи АРУ можно реализовать, или применяя специальный фильтр в цепи АРУ, или строя детектор АРУ таким образом, при котором его эквивалентная постоянная времени будет равна расчетному значению Тд = Тф. Пример 10.1. Требуется рассчитать систему АРУ с обратной связью, входящую в состав приемного устройства, принимающего амплитудно-модулированные импульсные сигналы, 410 Шход.ны£ данные: динамический диапазон изменения амплитуд входного сигнала Uшш = 5 мкВ; U tnax = 5 мВ, D = 10=*; максимально допустимое изменение амплитуды сигнала на выходе приемника Л [/3 щах = 0,5 В; номинальное выходное напряжение i/выхв = 1 В; система АРУ должна быть устойчивой с учетом разброса параметров элементов системы; коэффициент запаса устойчивости Х = 4; минимальная частота модуляции fmm, = 50 Гц (шш = 314); допустимый фазовый сдвиг на частоте модуляции = 10°; допустимое изменение глубины модуляции m;Jmj, = = 0,95; допустимый коэффициент нелинейных искажений Kf = = 0,15; максимально допустимое значение длительности переходного процесса tyy < 0,3 с при изменении амплитуды входного сигнала скачком на Dn = 6 дБ; длительность и частота повторения импульсов т = 1 мкс; = 1000 Гц [q == llxF = Ю^). УПЧ приемника содержит восемь каскадов. Усиление каждого каскада УПЧ Кц\ = 4,2 (12,5 дБ). Детектор приемника имеет коэффициент передачи Кд = 0,3. Видеоусилитель содержит два каскада е коэффициентами усиления Квуг = 4, /Свуг = 2. В каскадах УПЧ и ВУ применены транзисторы ГТЗП.Из расчета УПЧ и ВУ известно, что выходной порог ограничения УПЧ и видеоусилителя соответственно равны t/orpi = 2 В, Uovp2 = 5 В. Исходный режим в каскадах УПЧ выбран так, что (Уа = 0,3 В, Ктат = I Pel = 8,32. Расчет 1. Из расчета приемного канала можно найти параметры амплитудной характеристики. Начальньш коэффициетт усиления, определяющий наклон линейной части амплитудной характеристики к оси абсцисс, равен (10.2) Кор = 1/5 Ю * = 2 10 2. Поформуле (10.4) вычисляем напряжение ограничения видеоусилителя, приведенное к выходу УПЧ, Uorp ву= 2.40.Э Это напряжение выше порога ограничения УПЧ [/ гр ву = = 2,1 В > i/orpi = 2 В. Поэтому уровень ограничения приемного канала определяется ограничением УПЧ и приведенный к его выходу равен (10.4) Uorp = 2 0,3 4 2 = 4,8 В. 3. Напряжение задержки, приведенное к выходу приемника, определяется заданным номинальным уровнем выходного сигнала U3 = i/вых о = 1 в. Отсюда видно, что условие (10.6) выполняется, так как = > 2. Таким образом, цепь АРУ можно замыкать непосредственно с выхода видеоусилителя. 4. Полное число каскадов приемника, с учетом детектора и видеоусилителя равно п = II. Учитывая условие (10.14) можно установить, что не все эти каскады можно охватить цепью АРУ. Максимальная амплитуда сигнала на базе регулируемого каскада УПЧ (10.14) должна быть Ub.b < 2/10 4,2 = 0,048 В. Коэффициент усиления нерегулируемых каскадов можно определить по формуле (10.15): /Свых = 1/0.048 = 20,8. Это усиление 411 , обеспечивается двумя выходными каскадами УПЧ, детектором и' двумя каскадами видеоусилителя ( вых - 5): /Свых<4,2*х X 0,3 4 2 = 42. Отсюда можно найти максимальное число регу-лируемых каскадов шах = И-5 = 6. 5. Проверим, можно ли обойтись без усилителя в цепи АРУ. Положим Кару - Кпд - 0,25. При этом необходимо определить максимальное значение напряжения регулирования (10.23): и р max = 0,25 . 0,5 = 0,125 В. Минимальный коэффициент усиления и изменение усиления соответственно равны (10.26) и (10.27) /Ср mln = (1 + 0,5)/5 . 10- = 3 1№/3 10 = 666. (Ту = 2 Для Того чтобы обеспечить такое изменение усиления в шести каскадных УПЧ, в которых используется регулировка по схеме рис. 10.10, а, по формуле (10.32) требуется регулирующее напряжение ([/о - 0,3 В, /(шах Со1 = 1,98, Пр = 6) и р max т = 0,311 --(1,98-1) (1,98 /2-10/3- l)-i]- -0,025 In [(1,98- 1)(1,98 >/2.10/3- I)-*) = 0,29 В. Отсюда следует, что max< р тахт, и поэтому в цепь АРУ необходимо ввести усилитель так, чтобы обеспечить требуемый коэффициент передачи (10.34) цепи АРУ Кару = 0,29/0,5 = 0,58. При коэффициенте передачи пикового детектора Кпя = 0,25 необходим усилитель с коэффициентом усиления (10.35) Ку = 0,58/0,25 = = 2,32. 6, Коэффициент Л^тах ПО формулс (10.41) рзвен Л^тах = 0,58Х (1.98-1)- 0,025 0,3 JV ; 6 , 0,025 32,7. /. Постоянную времени фильтра иепи АРУ выбираем из условия (Ю.45). Для этого рассчитаем значения параметра Рп (10.46): pi = = У1 - (0,95)2 = 0,36, ра = tg 10° = 0,176, Рз = 0,15, отсюда Рп = 0,15 и из условия (10.45) Тф > 32,7/314 0,15 = 0,72 с. Находим N , соответствующий заданному перепаду амплитуд на входе (10.39), где = - 4-. /п = 2 (6 дБ), /V = 0,58 1,98- 1,98 (1.98-1)- 0,025 0,3 JV 2; = 7,06. 6- 0,025 1,98 0,3 Для того чтобы длительность переходного процесса не превышала заданной величины, постоянная времени Тф должна удовлетворять условию (10.47): Тф < 0,3 (1 + 7,06)/2,2 1,1 с. Условие устойчивости определяется неравенством (10.49) Тф > 4 32,7 . 10-2/2 = 0,0654 с. С учетом выполнения всех условий выбираем Тф = 1 с 10.4. РАСЧЕТ ДИНАМИЧЕСКОГО РЕЖИМА СИСТЕМЫ АРУ ВТОРОГО ПОРЯДКА В цепи обратной связи системы АРУ второго порядка в отличие от системы АРУ первого порядка содержатся два инерционных звена. Это может быть фильтр, состоящий из двух звеньев /?фСф (рис. 10.12, а), или инерционный детектор (рис. 10.12, б) и фильтр НфСф (рис. 10.12, а). Параметры стационарного режима в этом случае определяются так же, как и для системы АРУ первого порядка. В результате расчета необходимо определить постоянные времени инерционных звеньев цепи АРУ Тф и При этом Тг == RiC, а Тф = РфСф либо Тф = Та. Эти постоянные времени выбираются так, чтобы длительность переходного процесса и искажения модулирующего сигнала не превышали допустимых величин, а система АРУ работала устойчиво: (10.52) <Тф< У У Т2 = 4Л^цТф, где рп представляет собой наибольшее из чисел р^, рг и рз, определяемых допустимыми значениями фазового сдвига (ф^), от которого зависят (йщ, Тф)1, изменения коэффициента модуляции /Ивых/Ивх и коэффициента нелинейных искажений Kf- Pi = (ш1п^ф)1; Р2 = {2г'[(твых/Пвх)-1]}-: Ps = /o, 5{[1 + {4Щ)-] 2-1}, = /v v , w вггносительная интенсивность обратной связи. Величина (тшф)! определяется из уравнения Йт1пТф{41 (1 + (Йш1пТф)г]-1} (10.53) (10.54) (10.55) ♦13 которое можно решить графически. Для этого строится график зависимости tg ф t= /(й^цщТф) (рис. 10.16) и по заданному допустимому значению tg ф^ находится соответствующее значение (Q in Тф)1. Условие устойчивости импульсной инерцинной системы АРУ второго порядка при Та Тф, Та < имеет вид Тп Т2-1-Тф <1. 2 ф (10.56) Следует заметить, что непрерывные системы АРУ второго порядка всегда устойчивы.  tg<p 0,13 0,18 Щ
¥ 1,9 2,0 (Я„1 Ц} Рис. 10.16. Графики зависимостей lgф=f (ОшшТф). Пример 10.2. Требуется рассчитать систему АРУ второго порядка. Исходные данные: те же, что и в примере 10.1, за исключением того, что длительность переходного процесса должна быть меньше tyy = 0,1 с. 1. Все данные, полученные при расчете стационарного режима, такие же, как и в примере 10.1, Пр = 6, /Сару = 0,58, /V = = 32,7, Nn = 7,06. 2. В системе АРУ первого порядка заданную длительность переходного процесса обеспечить невозможно, так как условие выбора максимально допустимого значения постоянной времени Тф (10.47 0,1 (1 -f 7,06)/2,2 = 0,367 с несовместимо с условием (10.45 выбора минимального значения (см. пример 10.1) Тф > 0,72 с. 3. Для системы АРУ второго порядка максимально допустимое значение (10.52) меньшей постоянной времени т* равно тф< 0,1/6 = 0,167 с. 1- Ф f Параметр необходимый для дальнейших расчетов, равен (10.54) = 7,06/32,7 = 0,216. Минимальное значение Тф определяем из условия (10,52) -=4,81,. 1/2.0,216 1(1,05)2-1 j  Рз = /0,51/1--(4.0,216-0,1) - I =2,3. Уравнение (10.55) решим графически, построив функцию tgфl = / (йтщтф) (рис. 10.16, б) и проведя горизонтальную прямую с ординатой tgф^ = tglO = О, 76. В результате получим (fimmVi >- Р^ чисел наибольшее определяет рп == 4,81. Минимальное значение Тф (10.52) равно Тф > 4,81/314 = 0,0153 с. Следовательно, 15,3 мс < Тф < 16,7 мс. Выбираем Тф = 16 мс. При этом из (10.52) находим постоянную времени Та = 4 . 7,06х X 0,016 = 0,452 с. 10.5. ВЫБОР И РАСЧЕТ ЭЛЕМЕНТОВ ЦЕПИ АРУ Проектирование системы АРУ заканчивается выбором и расчетом принципиальных схем элементов цепи АРУ на основе рассчитанных параметров цепи АРУ. Чтобы реализовать расчетное значение коэффициента усиления цепи обратной связи, в состав АРУ вводится усилитель. Целесообразнее всего осуществлять усиление по переменному току, т. е. усиление сигнала до детектора АРУ, так как в этом случае проще реализовать большую стабильность параметров цепи АРУ. Усилители переменного тока в цепи АРУ строятся по той же схеме, что и выходные каскады приемника (УПЧ, УНЧ, ВУ). В качестве детектора АРУ иногда используется основной детектсф приемника, в этом случае сигнал регулирования снимается с нагрузки этого детектора и через разделительный фильтр подается в цепь АРУ. Детектор АРУ можно рассчитать по общей методике, изложенной в гл. 9. Но, учитывая, что к детектору АРУ предъявляются менее жесткие требования, чем к детектору приемника, эту методику можно упростить. Чтобы обеспечить коэффициент передачи диодного детектора близким к единице (/<д 1) и большое входное сопротивление, сопротивление нагрузки детектора /?нд выбирают в пределах 100-500 кОм. При этомемкость детектора Сд должна быть значительно больше межэлектродной емкости диода и удовлетворять условию (10...20) Rnj, /mln. (10.57) Часто детектор используется н как инерционное звено, обеспечивающее рассчитанную постоянную времени Тд = Тф. В системах второго порядка большую расчетную постоянную времени > реализуют с помощью дополнительного фильтра /?А = t,. (10.58) В импульсной системе АРУ эквивалентная постоянная времени пикового детектора (рис. 10.12) должна быть равна расчетному значению постоянной времени т^ цепи АРУ, (10.59) где q - Tjx - скважность импульсного сигнала; Тд = (R + + кл) Сд - постоянная времени заряда конденсатора (Сд) детектора; Ro - сопротивление источника импульсного тока (например, выходное сопротивление видеоусилителя); /?д - сопротивление диода детектора; Тр = РндСд- постоянная времени разряда конденсатора Сд; /?нд - сопротивление нагрузки с учетом входного сопротивления следующего каскада и обратного сопротивления диода,. Коэффициент передачи пикового детектора равен Я„д = 11-е , Тз<7-ЬТр Тр Тз у (10.60) Если выполняются условия TJg << Тз и Гд < Тр, то Кпд Тр/(Тз? + Тр). (10..61) Если считать, что Кпд и Тф заданы, то, решая совместно уравнения (10.59) и (10.60), можно определить постоянные Тз и Тр: Тз = Хф/К„д; Тр = Тф/ (1 - К^д). (10.62) Определив из расчета видеоусилителя Ra, а по справочнику прямое сопротивление диода /?д, можно найти емкость детектора Сд = Тз/ {Ro + R ) (10.63) и сопротивление нагрузки пд = Тр/С„. (10.64) Усилитель постоянного тока (УПТ) необходимо использовать в том случае когда нельзя обеспечить требуемое линейное усиление до детектора АРУ. Функции УПТ в этом случае иногда выполняет один из регулируемых каскадов приемника. Задержка в цепи АРУ осуществляется подачей запирающего напряжения на один из усилительных каскадов или на детектор цепи АРУ. В приемных устройствах, в которых необходимо сохранить амплитудную модуляцию с высокой степенью точности и обеспечить независимость средней амплитуды на выходе от глубины модуляции, задержку надо вводить после фильтра АРУ. В этих цепях переменная составляющая значительно ослаблена, и поэтому не возникает дополнительных нелинейных искажений за счет отсечки ее. При проектировании приемного устройства на ИС для цепи АРУ также подбираются соответствующие ИС. В настоящее время разработаны и выпускаются промышленностью отдельные универсальные ИС, в которых в одном корпусе собраны практически все элементы системы (УПЧ, детектор и цепь АРУ). Примером могут служить универсальные ИС типа К2ЖА372 и К2ЖА421, К2ЖА243 (81. Пример 10.3. Требуется выбрать и рассчитать элементы цепей АРУ, параметры которых рассчитаны в примерах 10.1 и 10.2. 416 Исходные данные: исходными данными служат параметры цепей АРУ первого и второго порядка, рассчитанные в примерах 10.1 и 10.2. Расчет Чтобы реализовать рассчитанные параметры системы АРУ первого порядка: Ку = 2,32, Кпд - 0,25, Ua = I В, Тф = I с, (Ур шя% = 0,29 В (при АУвых max = 0.5 В), - ПРОИЗВОДИМ выбор расчет элементов цепи .АРУ. 1 В качестве усилителя цепи АРУ используем интегральную схему К2УИ181, обладающую параметрами, приемлемыми для данной цепи АРУ: /(у 3, т = 1 мс, Ro = 400 Ом. 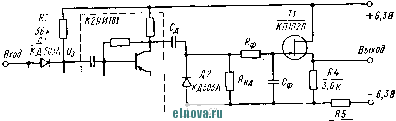
2,7 к Рис 10.17. Принципиа.пьпая схема импульсной системы АРУ. 2. Если рассчитанная постоянная времени цепи АРУ определяется фильтром, то можно выбрать следующие параметры этого фильтра: Рф = 100 кОм, Сф = 10 мФ. 3. Если пиковый детектор проектировать на диоде КД503А с Rr = 200 Ом так, чтобы его эквивалентная постоянная времени равнялась Тд = Тф, то постоянные заряда и разряда (10.62) Должны быть равны Тз = 1/0,25 10 = 4 \0- с, Тр == 1/(1 - 0,25) = -= 1,33 с. 4. Если сопротивление заряда R ~ {Ro + Rji) = 600 Ом, то емкость детектора (10.63) равна Сд = 4 10-V600 = 6,66 мкФ. 5. Сопротивление нагрузки детектора (10.64) равно RJ - - 1,33/6.66 10- = 200 кОм. 6. Для того чтобы исключить шунтирование нагрузки детектора сравнительно низким входным сопротивлением цепи регулировки, на выходе АРУ используем стоковый повторитель на полевом транзисторе КП102Л. Запас усиления в видеоусилителе компенсирует потери усиления в стоковом повторителе. Параметры системы АРУ второго порядка отличаются от параметров системы АРУ первого порядка только постоянными времени Тф и т . 7. Постоянная времени Тф определяется пиковым детекторо.м, поэтому из (10.62) Та = 0,016/0,25 10 = 0,064 10- с, Тр = = 0,016/(1 -0,25) = 22,3 10- с. 8. Емкость детектора (10.63) Сд = 0,064 10-=/600 = 0,107мкФ. 9. Сопротивление нагрузки детектора (10.64) /?нд = 22 3 х X ,10-8/0,107 10-0 = 208 кОм, 10. Сопротивление фильтра выбираем равным /?ф = 510 кОм, при этом емкость фильтра Сф = 0,452/510 10 = 0,888 мкф! Принципиальная схема рассчитанных импульсных систем АРУ-приведена на рис. 10.17. 10.6. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ НЕКОТОРЫХ РАЗНОВИДНОСТЕЙ СИСТЕМ АРУ При проектировании радиоприемного устройства РЛС необходимо учитывать, что на его вход поступают не только полезные сигналы (сигналы от целен), но и помехи, в частности отражения от местных предметов (зданий, возвышенрюстей, облаков, дождя и т. д.), которые могут создавать перегрузку каскадов приемника. Для уменьшения влияния такого рода помех [4] в приемных устройствах применяют быстродействующие автоматические регулировки усиления (БАРУ). Особенности проектирования БАРУ заключаются в том, что постоянную времени ФНЧ необходимо выбирать равной или несколько большей длительности полезного сигнала так, чтоби БАРУ не успевало уменьшить усиление приемника во время действия этого сигнала. БАРУ не может охватывать сразу несколько каскадов приемника, так как в этом случае создается опасность самовозбуждения регулируемого усилителя из-за слабой развязки в цепи обратной связи по высокой частоте при малой постоянной времени ФНЧ. Для обеспечения быстрой регулировки усиления при изменении помех в большом динамическом диапазоне самостоятельные цепи БАРУ вводят в нескольких каскадах приемника. Каждая цепь БАРУ содержит детектор и фильтр, кроме того, в ее состав могут входить усилители переменного и постоянного тока. Выбор параметров БАРУ, кроме указанных выше, и расчет ее элементов производятся так же, как и для инерционных АРУ. На входе приемного устройства обзорной РЛС уровни сигнал! лов, отраженных от различных целей, в значительной степени за-Т висят от дальности до этих целей. Для выравнивания амплитуд] выходных сигналов в таких приемных устройствах [4] применяют временные (программные) автоматические регулировки усиления (ВАРУ), формирующие регулирующее напряжение специальной (обычно экспоненциальной) формы (рис. 10.1). Исходные данные, необходимые для проектирования ВАРУ: динамический диапазон изменения амплитуд входного сигнала D, т. е. диапазон изменения усиления приемника; период повторения импульсных сигналов Т„, длительность импульсов г, время действия ВАРУ Твару- По заданному диапазону изменения усиления D определяют число^e-i гулируемых каскадов и необходимое максимальное регулирующее напряжение Up max так же, как и для замкнутых систем АРУ. Параметры Т„, т, Твару, Up ах служат исходными данными для расчета импульсного формирующего (программного) устройства, в качестве которого можно использовать ждущий генератор пилообраз!юго напряжения [9]. В состав ВАРУ (рис. 10.18) входит источник питания £ . зарядное устройство ЗУ, обеспечивающее заряд конденсатора С и управляемое синхронизатором РЛС, разрядное устройство (РУ) и эмиттерный повторитель (ЭП), обеспечивающий необходимую развязку с цепями регулировок усилителя. синхрон затора + 0- Рис. 10.18. Схема системы ВАРУ. В настоящее время автоматические регулировки усиления широко используются при проектировании приемных устройств со специальными видами амплитудных характеристик, в том числе логарифмических, дискретных н др. Наиболее полно вопросы проектирования таких устройств изложены в работах [4, 10, И]. При проектировании приемных устройств с АРУ часто приходится учитывать, что на его входе действуют не только сигналы, но и помехи (белый шум). Если на выходе приемника используется только часть составляющих спектра сигнала, расположенных вблизи несущей частоты (например, в приемных устройствах РЛС сопровождения по угловым координатам), то под действием АРУ, имеющей сравнительно малую постоянную времени фильтра нижних частот (ФНЧ), энергия помех вблизи несущей частоты может возрасти [12]. В этом случае для уменьшения этих помех приходится увеличивать постоянную времени ФНЧ Тф. Время переходного процесса (10.47) при этом соответственно возрастает. .Иногда применяют переключение постоянных времени ФНЧ в цепи АРУ. При появлении помех в цепи АРУ включается фильтр с большой постоянной времени. Максимальное значение постоянной времени выбирают исходя из допустимого увеличения инерционности всей системы, в которую входит приемное устройство с АРУ. СПИСОК ЛИТЕРАТУРЫ 1. Тартаковский Г. П. Динамика систем автоматической регулировки усиления. А'\.. Госэнергоиздат, 1957. 2. Крылов Г. М., Смирнов Г. А Транзисторные усилители с автоматической регулировкой усиления. М., Энергия , 1967. 3. Криеилов Ю Д. Автоматическая регулировка и стабилизация усиления транзисторных схем. М., Сов. радио , 1972. А. Лукошкин А. П. Радиолокаинонпые усилители с большим диапазоном входных сигналов. М., Сов, радио , 1964. 5. Волков В. М. Логарифмические усилители на транзисторах. Киев, Техника , 1965. 14* 6 Быстрин В. Ф. Стационарный режим транзисторного усилителя. - Изв. вузов СССР. Радиоэлектроника , 1968, т. XI, № 4. 7. Быетрик В. Ф. Аналитические выражения амплитудных характе-; ристик транзисторного усилителя с АРУ. - Изв. вузов СССР. Радиоэлект-; роника , 1968, т. XIII, № 12. 8. Справочник по полупроводниковым диодам, транзисторам и интег-.. ральным схемам. Под ред. Горюнова И. И. Изд. 3-е, М., Энергия , 1972., Авт.: И. И. Горюнов, А. Ю. Клейман, Н И. Комков и др. 9. Степаненко И П. Основы теории транзисторов и транзисторных схемЛ М., Энергия , 1973. 10. Волков В. М. Функциональные электронные усилители с широки ? динамическим диапазоном. Киев, Техника , 1967. ;f 11. Крылов г. М., Вишневская А. В. Проектирование чогарифмических усилителей с непрерыв1;ым детектированием сигналов. М., Энергия , 1970. 12. Широков В. В.. Репин В. Г. Воздействие помех на систему автоматической регулировки усиления. - Радиотехника , 1959, № 4. АВТОМАТИЧЕСКАЯ ПОДСТРОЙКА ЧАСТОТЫ В РАДИОПРИЕМНЫХ УСТРОЙСТВАХ П.1. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ ЧАСТОТЫ При проектировании супергетеродинных радиоприемных устройств различного назначения предусматривают ручные и автоматические регулировки частот гетеродинов. Указанные регулировки необходимы для обеспечения настройки приемника на частоты разных источников сигналов и подстройки его, чтобы создать наилучшие условия приема сигналов прн всех возможных изменениях как частот сигналов, так и частот настроек приемника [1]. Изменения частот могут быть вызваны колебаниями температуры, влажности и давления окружающей среды, изменениями условий распространения радиоволн, напряжений источников питания, эффектом Доп-плера и рядом других факторов. Несущая частота сигнала может также изменяться в соответствии с заданной программой (например, при быстрой перестройке от импульса к импульсу частоты передатчика импульсной РЛС). Если в приемном устройстве не применять регулировок частот, то необходимо расширять его полосу пропускания так, чтобы принимаемые сигналы не выходили из полосы приема при всех условиях эксплуатации. Это приводит к ухудшению чувствительности и избирательности приемника. Ручные регулировки частоты (РРЧ) сравнительно просты, и их часто применяют в радиоприемных устройствах. Однако, так как изменения частот нерегулярны, то наибольшую эффективность при-420 ема можно обеспечить, применяя автоматическую подстройку ча-\ стоты (АПЧ) гетеродина. По характеру изменения частоты подстраиваемого гетеродина системы АПЧ делятся на две группы [2]. 1. Системы АПЧ, стабилизирующие частоту гетеродина. В этом случае АПЧ осуществляет подстройку частоты гетеродина (Г) под ет алонн ую частоту (р ис. И. 1). В качестве источника колеба-- к смесителю НИИ эталонной частоты могут \ приемника использоваться высокочастотные контуры, которые определяют стабилизируемую частоту. Измерительный элемент (ИЭ) при этом представляет собой частотный детектор (ЧД), настроенный на эталонную частоту. Эталоном могут также быть колебания генератора эталонной частоты (ГЭЧ). Колебания гетеродина и эталонного генератора сравниваются в ИЭ, в качестве которого может использоваться фазовый детектор (ФД). Напряжение, пропорциональное отклонению частоты гетеродина от эталон-
Рис. 11.1. Структурная схема системы АПЧ, стабилизирующей частоту гетеродина.
УПЧ ЧД (ФД) \ ГЭЧ \ 1----f к последующим о каскадам ФНЧ Рнс, 11.2. Структурная схема системы АПЧ, стабилизирующей промежуточную частоту сигнала. К смесителю приемника От !ПЧ 9
Рис. 11.3. Структурная схема системы АПЧ с поисковый устройством. ной, используется в качестве сигнала ошибки в цепи управления гетеродина, состоящей из фильтра нижних частот (ФНЧ), усилителя постоянного тока (УПТ) и регулятора частоты (РЧ). 2. Системы АПЧ, стабилизирующие промежуточную частоту сигнала /ц, т. е. разность (или сумму) частот сигнала (передатчика) /с и гетеродина /г, которые могут независимо меняться под дейст- вием различных причин (рис. П.2). В таких системах АПЧ, в отличие от систем первой группы, содержится еще смеситель (С) и усилитель промежуточной частоты (УПЧ). Как и в системах первой группы, промежуточная частота здесь сравнивается с эталонной, в качестве которой можно использовать частоту настройки ЧД или частоту ГЭЧ. Часто в системах АПЧ используют поисковое устройство (ПУ), управляющее частотой гетеродина по определенной программе (рис. П.З). После того как частота гетеродина достигает значения, обеспечивающего попадание сигнала в полосу приема, в устройстве захвата (УЗ) вырабатываются сигналы захвата и перестройка частоты гетеродина прекращается. В качестве ИЭ в этом случае можно использовать резонансный контур, настроенный на стабилизируемую частоту гетеродина (для первой группы систем АПЧ) или на промежуточную частоту (для второй группы систем АПЧ). В некоторых системах АПЧ одни и те же каскады (чаще всего это выходные) могут сначала работать в режиме поиска , а затем при захвате переходить в режим слежения за частотой сигнала. Известны системы АПЧ, которые используются как измерители частоты сигнала [4]. По виду схем различают: электронные системы АПЧ, в которых используют только электронные элементы для усиления и преобразования сигналов, а также для регулировки частоты, и электромеханические системы АПЧ, в которых наряду с электронными элементами содержатся механические регуляторы частоты. Электронные системы АПЧ обладают ббльщим быстродействием, чем электромеханические, а электромеханические системы АПЧ позволяют обеспечить больший диапазон подстройки частоты. Часто используют комбинированные системы, в которых применены и электромеханические и электронные АПЧ. При этом обеспечивается сравнительно большой диапазон подстройки частоты и достаточное быстродействие. По характеру сигнала различают: непрерывные, импульсные и дискретные системы АПЧ. В дискретных системах АПЧ регулирующее напряжение формируется из импульсов одного такта работы приемника, а используется в следующем такте [б, 6]. По типу измерительного элемента системы АПЧ делятся на частотные (АПЧ) и фазовые (ФАПЧ). В частотных системах АПЧ в качестве измерительного элемента используются частотные детекторы, а в ФАПЧ-фазовые детекторы [4]. По быстродействию системы АПЧ делятся на быстрые (БАПЧ) и медленные инерционные [8]. В медленных системах АПЧ время установления переходного процесса во много раз больше времени установления переходного процесса в приемном канале, определяемого полосой пропускания канала (для импульсных приемных устройств - несколько периодов повторения импульсов). В БАПЧ время установления переходного процесса меньше длительности -импульсных сигналов. По характеру зависимости ошибки от величины внешнего воздействия системы АПЧ делятся на статические и астатические. Статическими называются такие АПЧ, в которых при постоянном внешнем воздействии имеется постоянная установившаяся ошибка, за- 422 висящая от величины воздействия. Астатическими называются такие системы, в которых при любом постоянном внешнем воздействии установившаяся ошибка равна нулю. Система является астатической, если в ее составе имеются интегрирующие элементы. Примером астатической системы АПЧ является ФАПЧ. Основными узлами АПЧ являются гетеродин, регулятор частоты гетеродина, частотный или фазовый детектор и фильтр низких частот. Кроме того, в систему АПЧ могут входить смеситель, преобразователь напряжения, усилители и эталоны частоты (источники эталонных колебаний). 11.2. РАСЧЕТ НЕПРЕРЫВНЫХ ЧАСТОТНЫХ СИСТЕМ АПЧ Вначале рассмотрим методику расчета электронной непрерывной частотной системы АПЧ второй группы (рис. 11.2). Методика расчета такой системы АПЧ является более общей, ее можно распространить и на другие варианты системы АПЧ с учетом их особенностей. На выходе ЧД формируется управляющее напряжение, которое через ФНЧ и УПТ подается на РЧ гетеродина. Номинальные значения частот промежуточной, гетеродина и сигнала соответственно равны /оп, /ог. /ос- Под действием различных дестабилизирующих факторов частоты сигнала и гетеродина изменяются (А/с, А/,.) и становятся равными /о = /ос + А/о; /р = /ог -f А/г. (11.1) Для нижней настройки гетеродина (/ог < /оо) промежуточная частота, ее номинальное значение и изменение равны /,. = /с - /г = /оп + А/п . /оп = /ос - /ог-. А/п = А/е - А/р. (11.2) Нижняя настройка гетеродина выбрана для большей определенности расчета, хотя методика расчета пригодна и для верхней настройки гетеродина (/ог > /оо). так как в этом случае изменяется только знак отклонения промежуточной частоты. Управляющее напряжение зависит от изменения промежуточной частоты. Основные характеристики и параметры систем АПЧ Статической характеристикой регулятора частоты (рис. 11.4) называется зависимость изменения частоты стабилизируемого гетеродина от подаваемого на него управляющего напряжения У yap- А/г = Ф (t/ynp). (11.3) Начало отсчета на этих характеристиках выбирается в середине рабочего диапазона частот гетеродина. В этой точке частота гетеродина /г должна соответствовать номинальному значению /ог. а управляющее напряжение должно быть равно нулю (Uyp = 0). Участок характеристики, проходящий через начало координат (начальный участок), аппроксимируется прямой линией. Крутизной 14В* 423 1 ... 18 19 20 21 22 23 24 25 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||