
|
| |
|
|
Главная » Книги и журналы 1 ... 17 18 19 20 21 22 23 ... 25 к нагрузке, а через диод Д2 от нагрузки к контуру. Пусть за счет быстрого приращения напряжения ток обоих диодов изменился на величину А/ п- Если на диоде Д/ напряжение возросло, то направление тока А/вп через него совпадает с направлением тока Iа-В это же время на диоде Д2 напряжение уменьшилось, уменьшился и выпрямленный ток, что эквивалентно протеканию тока Л/также от контура к нагрузке. Так как резисторы R1 и R2 равны и для токов низкой частоты включены параллельно (конденсатор СЗ представляет собой короткое замыкание для токов низкой частоты), то нагрузкой каждого детектора AM является сумма Ri/2 + /?вхунч. Падение напряжения на этой нагрузке при протекании тока 2 Ala [/н-2Л/,п(/?зхУнч +0,5Р1) = Л/,п(2РвхУн + Ri). (9.49) Уравнение (9.49) позволяет построить эквивалентную схему детектора отношений для токов низкой частоты (рис. 9.18, а). Напряжение низкой частоты на Rx унч будет равно Usx шч = иКд.а т 2Рох унч/ (2Рвх унч + RO (9.50) Эквивалентная схема дискриминатора для токов низкой частоты соответствует рис. 9.18, б, а выходное напряжение можно определить из уравнения /н= t/вхнч = 2{;mA: Q. (9.51) В уравнениях (9.50), (9.51) К^а - коэффициент передачи диодного детектора по низкой частоте. Следует подчеркнуть, что в отличие от применяемых на практике схем детекторов AM сигнала и дискриминаторов, схема детектора отношений приводится к детектору, сопротивление нагрузки которого для токов низкой частоты превосходит сопротивление нагрузки для постоянного тока. Отношение сопротивления нагрузки детектора по постоянному току к сопротивлению нагрузки по переменному току для детектора отношений Vi и дискриминатора равны: Vi = Pi/(2Pbx унч + Ri)\ V2 = (2 Pi + Рвх УНч)/Рвх унч. Расчет коэффициента передачи частотного детектора. Из рис. 9.14, 9.17 можно получить выражения для напряжений на 1-м и 2-м контурах полосового фильтра: I 521 I 1 I К I 6 (9.52) ---, (9.53) где 1 Пк - отношение напряжения на 1-м контуре к напряжению на коллекторе. Учитывая, что при оптимальном выборе параметров фазовращающего трансформатора, как было показано в начале параграфа, 884 Ls = L/4 fe?b; Us = t/i/2, a напряжение на диоде U - геометрическая сумма напряжений 0,5 и t/g. уравнений (9.62) и (9.53) имеем и = и,т^-ili-- (9.54) (9.55) 2f6xi/H4 а о Рис. 9.18. Эквивалентные схемы для токов низкой частоты: а -детектор отношений; б - дискриминатор. Понимая под коэффициентом передачи частотного детектора /Счд отношение напряжения на входе УНЧ к напряжению на базе ведущего транзистора, из соотношений (9.50), (9.51), (9.55) найдем соответственно для детектора отношений 2К„й I I тн R УНЧ т (2g -fgnx)(2/?3yH4 + l) УГ+F и для дискриминатора /Счд = 2Кдн I 211 т (2§к4-гвх) 1/14-Р (9.56) (9.57) Величина /Счд детектора отношений тем больше, чем больше входное сопротивление УНЧ. Оптимальный с точки зрения коэффициента передачи частотного детектора режим работы детекторной цепи совпадает с оптимальным режимом работы детектора AM сигнала. В зависимости от уровня подводимых к ЧД сигналов, рассчитывать величины Рвхд и /Сдп нужно по разным методикам. При больших сигналах детектор AM можно считать линейным, при малых - экспоненциальным с характеристикой
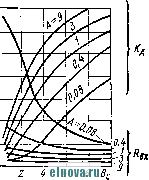 Рис. 9.19. Зависимость приведенного входного сопротивления и коэффициента передачи детектора от уровня сигнала. i - г'о (e д - I). В этом случае входное сопротивление детектора AM и коэффициент его передачи по постоянному току могут быть определены из графика на рис. 9.19. Для этого необходимо вычислить величины А = yioRi и 5с = 1,41 у^/д. При этом /Сда определится выражением h (So) /о (fic) где /о, /j. - функции Бесселя. А + ВоК, (9.58) Подавление сопутствующей амплитудной модуляции При амплитудной модуляции напряжения на диодах частотного детектора изменяются синфазно. Поэтому в первом приближении (пренебрегая зависимостью коэффициента передачи детектора по низкой частоте для AM сигнала /Сдйам от 11) низкочастотное напряжение на выходе дробного детектора и дискриминатора пропорционально величине t/i - t/al- Следовательно, в детекторах обоих типов при симметричности их схем и совпадении частоты сигнала с частотой настройки выходное напряжение, вызванное сопутствующей AM, отсутствует. В случае несовпадения частоты сигнала с частотой настройки напряжение на нагрузке, вызванное амплитудной модуляцией, в значительной степени зависит и от глубины ее на диодах (отдм) и от величины /Сдйам. В [61 показано, что, поскольку входное сопротивление детектора зависит от величины сигнала, глубина модуляции высокочастотного напряжения на диоде отличается от гл>-бины модуляции напряжения на входе преддетекторного каскада. При этом /пдм может оказаться существенно меньше, если детектор возбуждается генератором тока. Поскольку для выполнения указанного условия в схемы частотных детекторов обычно не включают источники смещения, необходимо обеспечить как можно большие значения подводимых к диодам сигналов, минимальные значения и R., .максимальное различие нагрузок для постоянного тока и токов низкой частоты при AM: Rl > JR лм. В частности, при использовании дискриминатора получают хорошие результаты по подавлению AM, если R не превышает 5-10 кОм, а /?вх УНЧ < 0,2Что касается детектора отношений, то благодаря конденсатору СЗ и включению входа УНЧ между точками 1 н2 Rk мл оказывается малым. Высокая степень подавления AM достигается симметричностью схемы детектора. Асимметрия может быть вызвана паразитной связью между катушками L3 н L2, неидентичностью обеих половин катушки L2 и различием параметров диодов. Для симметрирования схемы используют резисторы, включенные между диодами и нагрузкой. Расчеты показывают, что величина подавления AM мало зависит от р при 0,5 < р < 2. Нелинейные искажения и дополнительные настройки в частотном детекторе Наряду с подавлением амплитудной модуляции параметры частотного детектора во многом определяют уровни нелинейных искажений и дополнительных настроек в приемнике. Коэффициент гармоник kf можно рассчитать методом трех ординат [5]. При этом считается, что цепь диодов не вносит искажений, т. е. вносимые со стороны диодов сопротивления не меняются в процессе частотной модуляции сигнала. В этом случае где . . 1 W[-U Vl + (0.5+P)-l/l+(0,5=P)i (9.59) 1/(1-f §2-0,25g2) + pi На практике значение ife будет несколько больше, чем рассчитанное по формуле (9.59). Во-первых, уровень 3-й гармоники увеличивается из-за нелинейности детекторной цепи. Во-вторых, при расстройке сигнала сопротивления, пересчитанные со стороны детекторной цепи в контуры фазовращающего трансформатора, будут отличаться от /?вх. что приводит к искажениям вольт-частотной характеристики частотного детектора (S-кривой). Искажения, вызванные нелинейностью диодов, невелики. При напряжениях не менее 200 мВ уровень 3-й гармоники в цепи диодов не более 0,5%. Искажения, вызванные зависимостью вносимых сопротивлений от частоты сигнала, имеют существенное значение при больших относительных расстройках (при 0,3). Практически можно считать, что суммарный коэффициент гармоник частотного детектора будет меньше 1,5%, если выполняются следующие условия: 0,5 < р < 2, К 0,3 и g < 0,3 f>. Кривая зависимости напряжения на выходедетектора от частоты Настройки в метровом диапазоне имеет, как правило, три максимума (рис. 9.20). Средний нз них - полезный, соответствует настройке на среднюю точку S-кривой. Боковые максимумы - вредные. Они образуются из-за детектирования, соответствующего боковым скатам резонансной кривой (рис. 9.20). В приемниках эффективное ограничение напряжения промежуточной частоты наступает при подаче на вход приемника сигнала, в 2-3 раза превышающего его чувствительность. Для таких сигналов S-кривая всего приемника будет практически соответствовать S-кривой частотного детектора. С уменьшением параметра связи величина подавления дополнительных составляющих увеличивается и при р < 0,5 может превысить 10 дБ. пример 9.4. Рассчитать элементы частотного детектора (рис. 9.14) и его параметры. ~ Исходные данные: напржение на диоде (/ = 200 мВ; промежуточная частота /п = 10,7 мГц; входное сопротивление УНЧ Pes УНЧ = 2,5 кОм; раствор детекторной характеристики 2П = = 300 кГц. 1. Определяем Рвх д детектора AM. Зададимся сопротивлениями нагрузки для постоянного тока = р^ - Ю кОм. Используем экспоненциальную аппроксимацию характеристики диода. Для точечного германиевого диода можно принять г'о = = 3 мкА, Y = 29 В-. Рассчитываем величины Л = Yoi = 0,9, Вс = 1,417б/д = ==8. Тогда из рис. 9.19 находим Рвхл ~ =0,7 . 10 = 7 кОм. 2. Определяем параметры фазовращающего трансформатора. Для выполнения заданной полосы рабочих частот выбираем 2 П= (2/3) /оР4- Величина /о prfg характеризует раствор характеристики ЧД. Выбираем затухание незагруженных контуров 4о = 0,01, р = 2. Требуемое эквивалентное затухание нагруженного контура при этом равно 4 = у-. Рассчитываем емкость контура, обеспечивающую необходимое 4,  Рис. 9.20. Зависимость выходного напряжения частотного детектора от расстройки сигнала. dad, :84 пФ. Индуктивности контуров равны Li,2=1/(coCh) = 2,6 мкГ. Находим коэффициент связи между катушками LI н L3 /св~Рх Хйэ = 0,05, отсюда в соответствии с (9.45) , 2,6-10- 4-25-10-* - = 0,25 мГ. 3. Рассчитываем /Сда. Из графика на рис. 9.19 получаем коэф- фициент передачи детектоа AM для постоянного тока /Сд = 0,52. Для детектора отношений имеем Vi = 0,68 и согласно (9.57) получаем /Сдй = 0,82. Для дискриминатора имеем V2=:9,/(до =0,155. 4. Определяем напряжения на входе УНЧ. Глубина амплитудной модуляции на каждом диоде согласно формуле (9.48) m = 0,36. Напряжение на входе УНЧ в схеме детектора отношений согласно (9.50) и^хич^ 20 мВ; в схеме частотного дискриминатора согласно (9.51) и„х вч - 16 мВ. 9.4. ФАЗОВЫЕ ДЕТЕКТОРЫ Фазовые детекторы находят широкое применение в различных фазометрических устройствах в системах автоподстройки частоты, в следящих узкополосных фильтрах, способных автоматически перестраиваться при изменении частоты принимаемого сигнала, а также для детектирования фазомодулированных и фазоманипулированных сигналов. По способу построения их можно разделить на векторо-мерные и коммутаторные. Из векторомерных наиболее часто применяют балансные фазовые детекторы. Балансный фазовый детектор Такой детектор (рис. 9.21, а) состоит из двух встречно включенных амплитудных детекторов, нагрузкой которых являются соответственно резисторы и конденсаторы R1, СТ, R2, С2. При этом Cl = Ci = С п Ri = Ri R. Одно из входных напряжений подво- 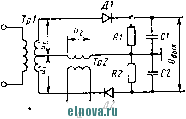 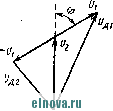 Рис. 9.21. Схема балансного фазового, детектора (а) и векторная диаграмма для его расчета (б). дится к схеме с помощью трансформатора Тр1 со средней точкой таким образом, чтобы составляющие этого напряжения и[ и ul имели одинаковую амплитуду и действовали на диоды Д1 w Д2 в противофазе, т. е. ul = Ui cos (coi + Ф1); 1 = - i/i cos (coj/ + Ф1). Второе входное напряжение = U2 cos (cog/ + Ф2) через трансформатор Тр2 подводится к диодам с одинаковой фазой. Таким образом, на каждом из диодов действует сумма двух напряжений (конденсаторы С/ и С2 для токов частот 1 и (О2 представляют короткое замыкание): идх = 2 + 1, Д2 = U2 + 1- Амплитуды результирующих напряжений Uixi и б'дг можно определить графически с помощью векторных flHarpaMjvi (ри£. 9.21, б). Результирующий фазовый угол ф между векторами t/j и определяется равенством ф = (coj - cog) / + Ф1 - Ф2- С помощью диаграмм легко получить значения результирующих амплитуд иапряжений, приложенных к диодам Д/ и Д2, /д1 = VUI +1/ + cos Ф, Up-Vui-irUI - 2Ut cos ф. (9.60) Напряжения (/д1 и £/д2 детектируются и на нагрузках амплитудных детекторов возникнут напряжения (/вых1 = д^д1; йВЫХ2 = КaUд,2, где --коэффициент передачи амплитудного детектора. Результирующее выходное напряжение фазового детектора и^ых = вых 1 - вых2 = :д (УЩ + Щ + 2[/ [/а cos ф --VU! + UI-2Ui и.,созф). (9.61) Это выражение представляет собой уравнение амплитудно-фазовой характеристики балансного фазового детектора. Крутизну характеристики балансного фазового детектора можно найти, дифференцируя уравнение его амплигудно-фазовой характеристики (9.61): 8фа = 2Каи1и^1Уи\ + и1 (9.62). Уравнение (9.6Ь) можно упростить, разложив каждое слагаемое в степенной ряд и ограничившись двумя первьши членами разложения: вых = 2/Сд Ut и, cos ф/Vt/f + Щ. (9.63) При этом 5фд по-прежнему определяется выражением (9.62). Если амплитуда одного из входных напряжений существенно больше амплитуды другого (например, Uj), уравнение харак- теристики оказывается еще более простым: вых ~ 2 АГд^/х cos ф. (9.64) При этом 5фд 2 KaUj. (9.65) Основное уравнение амплитудно-фазовой хара1ктернстнки (9.61) является симметричным относительно амплитуд входных сигналов Ul и и^. Поэтому с точки зрения работы схемы безразлично какой из входных сигналов будет являться опорным. Для балансного фазового детектора характерно, что его выходное напряжение зависит от соотношения амплитуд входных напряжений h = U/Ui (рис. 9.22). Амплитудно-фазовые характеристики, приведенные на рис. 9.22, построены по (9.63) для различных значений h. По оси ординат отложены обобщенные значения у = = U&biJKjiUi. Анализ приведенных графиков позволяет сделать следующие выводы. При Ui = f/ характеристика практически может считаться линейной, крутизна ее согласно (9.62) будет равна фд = Y2KU. Если и^ > Ul, то характеристика приближается 390 к косинусоидальной, а крутизна детектора стремится к своему максимально возможному значению (9.65). Предельное значение обобщенной величины у = 2 свидетельствует о том, что максимальное напряжение на выходе детектора не может превышать удвоенной величины наименьшего из входных напряжений (при условии /Сд = 1). Предельное значение коэффициента передачи напряжения будет равно /Сфд = 2 /Сд. При выполнении неравенства U. > Ui величина максимального значения выходного напряжения зависит практича;ки только от наименьшего из входных напряжений, в данном случае от Ul. Следовательно, если требуется, чтобы [/цьтх оставалось неизменным при работе фазового детектора в условиях изменения амплитуды одного из сигналов, необходимо обеспечить постоянство амплитуды наименьшего из двух входных напряжений. Например, при постоянной амплитуде опорного напряжения (U) для сохранения неизменным выходного напряжения при колебаниях амплитуды напряжения входного сигнала (t/i) необходимо, чтобы всегда выполнялось условие Ul > и^- Оценим приближенно порядок входных сопротивлений балансного фазового детектора. Если внутреннее сопротивление диода намного меньше сопротивления нагрузки, то входное сопротивление последовательного диодного детектора при достаточно больших входных напряжениях приближенно равно RI2. Следовательно, входное сопротивление балансного фазового детектора со стороны первого входа, пересчитанное ко вторичной обмотке трансформатора Тр1 (см. рис. 9.21, а), будет равно сумме двух входных сопротивлений амплитудных диодньпс детекторов, т. е. Яъх ю. R-
Рис. -9.22. Обобщенные характеристики фазового детектора. (9.66) Со стороны второго входа входное сопротивление, приведенное ко вторичной обмотке трансформатора Тр2, будет складываться из двух параллельно включенных входных сопротивлений диодных детекторов, следовательно /?зкФД /?/4. (9.67) Заметим, что для упрощения все входные напряжения и сопротивления в схеме на рис. 9.21, а рассматривались приведенными ко вторичным обмоткам трансформаторов Тр/ и Тр2. Очевидно, эти величины можно легко пересчитать к первичным обмоткам, т. е. Непосредственно на оба входа схемы фазового детектора. Рассмотрим некоторые соотношения между элементами нагрузки балансного фазового детектора. Как уже отмечалось, величину резистора R выбирают из условия R Rt. Постоянная времени нагрузки RQ должна быть, с одной стороны, такой, чтобы выполнялось известное из теории амплитудных детекторов неравенство RC 2n/comin (где (Omin - минимзльная частота входных напряжений детектора). С другой стороны, чтобы при coi Ф не искажалась форма выходного напряжения и таким образом обеспечивалось требуемое быстродействие, должно выполняться условие RC < 2n/(coj - co2)max- Последнес неравенство, очевидно, теряет свой смысл, когда coi = сог- В этом случае верхняя граница постоянной времени РС будет определяться возможной максимальной скоростью изменения фазового угла Фо = фх - Фг между сравниваемыми напряжениями. При практическом использовании фазовых детекторов (особенно в системах фазовой автоподстройки частоты) предъявляются весьма высокие требования к фильтрации отличных от со - сог комбинационных частот на выходе детектора, неизбежно образующихся в процессе детектирования. Эти побочные комбинационные составляющие отрицательно сказываются на работе системы автоподстройкн и могут привести к значительным ошибкам. В тех случаях, когда предъявляются высокие требования к фильтрации указанных комбинационных составляющих, прибегают к использованию более сложных (например, кольцевых) фазовых детекторов. Хорошие результаты могут быть также получены при использовании коммутаторных фазовых детекторов. Коммутаторный фазовый детектор Такой фазовый детектор (рис. 9.23) выполнен в виде балансного перемножающего устройства с дифференциальным входом. Входной сигнал Ui подается на базу транзистора Т1, сигнал управляющего 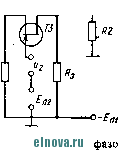 Рис. 9.23. Коммутаторный вый детектор. напряжения - непосредственно на Затвор полевого транзистора ТЗ. Последний работает как управляемый напряжением аттенюатор с нулевым смещением на участке исток - сток. Вследствие баланса цепи по постоянному току управляющее напряжение, приложенное к затвору ТЗ, изменяет только сопротивление канала полевого транзистора, не влияя на условия передачи постоянных смещений в цепи. При использовании рассмотренной балансной схемы перемножителя в спектре выходного напряжения удается значительно ослабить составляющую частоты соа и все комбинационные составляющие, за исключением со ± coj- Составляющие частоты со при этом из спектра не исключаются. Однако при выполнении условия щ - - co2<coi ее влияние почти не сказывается, так как она будет подавлена фильтром, стоящим после фазового детектора. Допуская, что участок затвор - канал имеет бесконечное сопротивление и что амплитуда напряжения сигнала значительно меньше напряжения отсечки полевого транзистора, можно показать, что коэффициент передачи фазового детектора для симметричного выхода может быть выражен в следующем виде: КфД = ЗИ оте RUi COS ц>. (9.68) где 5нач - начальная крутизна полевого транзистора ТЗ (при UsH = 0); f/зиотс - напряжение отсечки ТЗ; Рн -сопротивление нагрузки каждого плеча схемы; U2 - амплитуда управляющего напряжения на затворе. Входное сопротивление схемы на частоте сигнала определяется величиной равных сопротивлений Pj, Р2 и имеет порядок Рвх < < 1 кОм. Максимально возможный коэффициент передачи такого фазового детектора при условии U2 - 0,5 Узи ото определяется выражением Кфл == 0,5 SaanRu. (9.69) СПИСОК ЛИТЕРАТУРЫ 1. Радиоприемные устройства. Под ред. В. И. Сифорова. М., Сов. радио , 1974. Авт.: И. Н. Амиантов, Ю. Н. Антонов-Антипов, В. П. Васильев и др. 2. Расчет радиоприемников. Под ред. Н. В. Боброва. Воениздат, 1971. Авт.: Н. В. Бобров, Г. В. Максимов, В. И. Мичурин, Д. П. Николаев. 3. Арзуманов В. Н., Дехтярев В. С. О подавлении амплитудной модуляции в дробном детекторе. -- Труды ЛПИ им. М. И. Калинина , 1958, № 194. 4. Гуткин Л. С. Лебедев В. Л., Сифоров В. И. Радиоприемные устройства. М., Сов. радио , 1961. 5. Чистяков Н. И., Сидоров В. М., Мельников В. С. Радиоприемные устройства. М., Связьиздат, 1958. 6. Калихмаи С. Г., Левин Я. М. Основы теории и расчета радиовещательных приемников на полупроводниковых приборах. М., Связь , 1969. 7. Лукошкин А. П. Усилители на транзисторах со стабильными фазовыми характеристиками. М., Энергия , 1973. АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА УСИЛЕНИЯ В РАДИОПРИЕМНИКЕ 10.1. ОБЩИЕ СВЕДЕНИЯ ОБ АРУ В РАДИОПРИЕМНИКАХ Распространенным способом регулировки усиления в радиоприемных устройствах является ручная регулировка усиления (РРУ), основанная на использовании переменных резисторов для изменения режимов работы транзисторов в каскадах приемника или затухания в управляемых аттенюаторах. Вручную можно изменять или, наоборот, компенсировать возникшие по разным причинам колебания унч -о фнч о-> Рис. 10.1. Структурная схема разомкнутой инерционной системы АРУ. Л
От синхронизатора Рис. 10.2. Структурная схема системы временной АРУ (а) и временная диаграмма, поясняющая принцип ее работы (б). уровня выходного сигнала (изменения входного сигнала, усиления приемника из-за колебаний температуры, напряжения питания и т. д.). Для того чтобы освободить оператора от операций регулировки усиления, применяют автоматические регулировки усиления (АРУ). С помощью АРУ обеспечивается необходимое для нормальной работы оконечных устройств систем постоянство выходных сигналов при значительных изменениях интенсивности принимаемых сигналов. АРУ предотвращает перегрузки приемного устройства сильными сигналами и тем самым устраняет нелинейные искажения в приемном канале, которые могут возникнуть при приеме амплитудно-модулированных сигналов [1]. По принципу построения АРУ делятся на разомкнутые, или без обратной связи (рис. 10.1, 10.2), и замкнутые, или с обратной связью (рис. 10.3, 10.4). АРУ без обратной связи обеспечивает высокое постоянство амплитуды выходного сигнала при изменении входного сигнала в широких пределах. Однако величина стабилизируемого выходного сигнала в значительной степени зависит от стабильности параметров цепи АРУ (например коэффициента усиления), а время переходного процесса в разомкнутой системе больше, чем в замкнутой системе. Наибольшее распространение получили инерционные системы АРУ с обратной связью. Они подразделяются на системы непрерывного и импульсного действия. Все перечисленные системы АРУ могут быть задержанными или незадержанными. При использовании задержанных АРУ регулировка усиления начинается лишь после превышения сигналом некоторого минимального значения. Д фнч унч Д уич фнч унч -Н !нч фнч ФНЧ дав Рис. 10.3. Структурные схемы систем АРУ непрерывного действия с обратной связью: а - неусиленная с совмещенным детектированием; б - неусиленная с раздельным детектированием; в -с усилением по переменному току; г -с усилением по постоянному току. А упт фнч соответствующего выбранному порогу срабатывания, называемому напряжением задержки АРУ \j. В незадержанной АРУ порог срабатывания не вводится и регулирование осуществляется при наличии сигнала любой величины. Системы АРУ могут быть усиленные и неусиленные в зависимости от наличия или отсутствия в цепи АРУ усиления. Усиление может осуществляться до детектора АРУ (по переменному току) и после детектора АРУ (по постоянному току). На приведенных схемах регулируемыми усилителями (РУ) условно называются те части приемника, на каскады которых воздействует регулировка усиления. Это могут быть усилители высокой и промежуточной частот, причем чтобы уменьшить нелинейные искажения, регулировке подвергаются каскады, на входе которых уровни сигналов малы. Для всех рассмотренных видов систем АРУ с обратной связью как непрерывного действия, так и импульсных можно составить обобщенную структурную схему (рис. 10.5). К такому виду можно привести большинство систем АРУ, содержащих регулируемые каскады и цепь обратной связи (цепь АРУ). Регулировкой усиления можно охватить отдельно УВЧ, УПЧ или УНЧ (ВУ при импульсной работе), а также сразу несколько усилителей. Основными элементами цепи АРУ являются усилители по переменному (У) и постоянному (УПТ) току, детектор (Д) и фильтр нижних частот (ФНЧ). В один из Рис 10.4. Структурная схема импульсной системы АРУ. элементов вводится цепь, определяющая порог срабатывания (напряжение задержки АРУ Ua). В детекторе АРУ (ДАРУ) при непрерывной работе выделяется напряжение регулирования путем детектирования высокочастотных колебаний сигнала, при импульсной работе с помощью пикового детектора (ЯД) производится детектирование видеоимпульсов. Если исключить усилители, то получится неусиленная АРУ, при Us = О - незадержанная. Свойства системы АРУ и качество ее работы определяются основными ее характеристиками и параметрами. Амплитудной характеристикой приемника (регулируемого усилителя) (рис. 10.6) назы- Tup(t) Цепь Ш -о УПТ I ii =3 j
о OexmLn так Рис. 10,5. Обобщенная струк- Рис. 10.6. Амплитудные характеристики турная схема системы АРУ. приемника без АРУ (/), с незадержанной (2), и задержанной (5) системами АРУ. вается зависимость амплитуды выходного напряжения (Uъы-д от амплитуды входного напряжения {и^х) вых =/(t/Bx). (10.1) При отсутствии автоматической регулировки усиления эту характеристику (/ иа рис. 10.6) можно считать линейной только до определенного значения, близкого к [/вых = Уог^ При больших амплитудах сигнала происходит ограничение сигнала. Параметр [/огр (напряжение ограничения) необходим для дальнейших расче- тов. Угол наклона характеристики к оси абсцисс (а„) определяется начальным коэффициентом усиления приемника, подвергающегося регулировке (УСор) tgUH = /Сор = (/выхо вх mln, (10.2) где [/вх mln И [/выхо - амплитуды минимального входного и соответствующего ему выходного сигналов. Амплитудная характеристика приемника при воздействии АРУ, определяющая качество регулирования в диапазоне изменения амплитуды входного сигнала, имеет различный вид при отсутствии, задержки (2 на рис. 10.6) и при наличии ее (3 на рис. 10.6). Амплитудную характеристику приемника при отсутствии АРУ можно приближенно определить при,расчете УВЧ, УПЧ и детектора, зная коэффициент усиления приемника (/Сор) и выходные характеристики транзисторов последних каскадов приемника и учитывая, что огра-396 ничение обычно имеет место в одном из них. По выходной характеристике транзистора k-ro каскада приемника оценим амплитуду тока ограничения lovph Л! 0,5 /нас (нао-ток насыщения), а следовательно, и напряжение ограничения этого каскада orpfe = orpft Hfe. (10.3) где Rnh - эквивалентное сопротивление нагрузки -го каскада. Это напряжение ограничения можно пересчитать на выход приемника (усилителя), умножая полученную величину на коэффициент усиления последующих каскадов. При этом напряжение ограничения приемника будет определяться меньшим из полученных напряжений torp = orpft ATft+i/Cft+a . /(п (10.4) и в случае равных коэффициентов усиления каскадов ,1С-\ (10.5) [/огр = и orpft где - коэффициент усиления последнего каскада. Обычно ограничение имеет место в последнем или предпоследнем каскадах усиления, так что Л = п - 1 или Л = п. В транзисторных усилителях Urp составляет величину порядка нескольких вольт. Чтобы обеспечить неискаженную передачу сигналов с амплитудной модуляцией, а также малое время установления при быстрых h3j менениях интенсивности входного сигнала, необходимо рабочий уровень сигнала на выходе [/выхо. определяемый напряжением задержки АРУ ([/з = [/вых о), выбрать меньше [/ р: [/огр з>2. (10.6) Если в выходном каскаде видеоусилителя это условие не выполняется, то замыкать петлю АРУ следует не с выхода, а с одного из предшествующих каскадов видеоусилителя. По параметрам /Со р и [/огр, полученным при расчете основного канала приемника, можно построить приближенную (кусочно-линейную аппроксимацию) амплитудную характеристику приемника (/ на рис. 10.6). Амплитудной характеристикой цепи АРУ (рис. 10.7) называется зависимость стационарного значения напряжения регулирования от стационарной амплитуды выходного напряжения регулируемого приемника Ч/р = Ф ([/вых). (10.7) Если напряжение задержки равно нулю Ua = О, то характеристика проходит через начало координат ([/вых = 0, [/р = 0). При введении задержки напряжение регулирования появляется только при превышении выходным напряжением уровня [/вых = в. т. е. характеристика смещается вправо вдоль оси абсцисс и проходит через точку [/ ых = з. t/p = 0. Характеристику можно аппроксимировать прямыми (/, 2 рис. 10.7). Пересечение аппроксимирующей наклонной прямой с осью абсцисс определяет напряжение задержки t/g. Тангенс угла наклона этой прямой к оси абсцисс (Рн) равен коэффициенту усиления цепи обратной связи АРУ: Кару = tgPn. (10.8) Ордината горизонтальной прямой, аппроксимирующей область' ограничения, равна уровню ограничения Uporp в цепи АРУ. Чтобы можно было регулировать усиление во всем заданном диапазоне, необходимо выполнение следующего условия: ых шах Кару, (10.9) где Д(Увых max - максимзльное изменение амплитуды сигнала на выходе. Ограничение может происходить не только в последних кас-
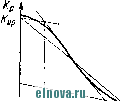
Рис. 10.7. Амплитудные характеристики Рис. 10.8. Регулировочная харак-цепи АРУ без задержки (/) и с задерж- теристика. кой (2). кадах цепи АРУ, но и в усилителе, предшествующем фильтру. Так же можно оценить уровень ограничения усилителя цепи АРУ и пересчитать его к выходу регулируемого усилителя (/огр i/orp=;rp. (10.10) Регулировочной характеристикой системы АРУ называется зависимость коэффициента усиления регулируемого приемника (усилителя) от напряжения регулирования л:р = /(р). (10.11) Параметры транзисторов или диодов регулируемых каскадов изменяются нелинейно под действием напряжения регулирования 12], поэтому регулировочная характеристика нелинейна (рис. 10,8). Чтобы регулировка усиления была плавной, эта характеристика должна быть непрерывной и монотонно убывающей в рабочем диапазоне изменения (7р, ибо только в этом случае росту напряжения регулирования будет соответствовать уменьшение усиления. Часто при расчетах применяют кусочно-линейную аппроксимацию регулировочной характеристики [3]. При этом регулировочную характеристику (рис. 10.8) разбивают на п участков так, чтобы на каждом из них она достаточно точно совпадала с прямой. Нумерацию этих участков производят последовательно вдоль оси абсцисс от начала 98 координат (1, 2, 3,..., k, п). Уравнения аппроксимирующих прямых имеют вид (10.1J) Основными параметрами регулировочной характеристики для участка с номером k являются коэффициент усиления {Кри), равный ординате при заданном (Ур, и начальный коэффициент усиления Kopft - ордината точки, в которой [/р = 0; крутизна регулировочной характеристики (5ру), определяемая наклоном аппроксимирующих прямых. Исходными данными для расчета систем АРУ радиоприемных устройств различного назначения являются: - динамический диапазон изменения амплитуд входного сигнала, равный отношению максимальной амплитуды сигнала {И^ max) к минимальной ([/вх min) D = и. вх max 1 вх mini (10.13) соответствующее этому диапазону максимально допустимое изменение амплитуды на выходе приемника Д[/вых max! - номинальное стабилизируемое выходное напряжение - требование по обеспечению запаса устоичивостп работы системы АРУ (коэффицент запаса устойчивости %); - минимальная частота fmin или минимальная круговая частота Qmin модуляции {тШ = 2 ПрщУ, - допустимый фазовый сдвиг на минимальной частоте модуляции Фх; - допустимое изменение глубины модуляции выходного сигнала по отношению к глубине модуляции входного (Швых/вх); - допустимый коэффициент нелинейных искажений {KfY, - допустимое значение длительности переходного процесса (tyy) при изменении сигнала на входе скачком на Оп=[/ех п вых mm (чаще всего Dn = 6 дБ), где С/вх п - амплитуда входного сигнала, соответствующего заданному скачку (перепаду) D; - длительность т и частота следования Fa, или период повторения Тп импульсов для импульсной системы АРУ. Входные сигналы радиоприемного устройства могут меняться в весьма широких пределах. Например, в некоторых радиолокационных станциях (4, 5] диапазон сигналов D, принимаемых от различных целей, превышает 100 дБ. Еще более значительно могут изменяться сигналы в космических системах связи. Во многих случаях принимаемая полезная информация содержится в амплитудной модуляции сигналов. В приемных устройствах с АРУ медленные изменения сигналов, обусловленные изменением расстояния между радиокорреспондентами, изменением условий прохождения электромагнитных колебаний и т. п., должны компенсироваться, в то время как модулирующий сигнал должен быть передан с мальши искажениями. На практике при инженерных 0,1 п Рис. 10.9. Переходная характеристика в цепи АРУ. расчетах задают требования к искажениям не всего сложного модулирующего сигнала, а только составляющих нижних частот огибающей (в случае периодической огибающей - это 1-я гармоника). На этих частотах происходят наибольшие искажения. Таким образом, при проектировании приемника сигналов с амплитудной модуляцией задают следующие параметры: фазовый сдвиг ф1, изменение глубины модуляции т^ы^тах и коэффициент нелинейных искажений Kf на заданной частоте firnm- В приемных устройствах, в которых возможны быстрые изменения сигналов (быстрая перестройка приемника с одной станции на другую, быстрое перемещение приемника относительно передатчика и т. д.), задают требования к параметрам переходных процессов в системе АРУ. В частности, ограничивают длительность переходного процесса tjy при скачкообразном изменении интенсивности сигнала. Длительность переходного процесса равна интервалу времени между точками, определенными уровнями 0,1 и 0,9 от стационарного значения напряжения регулирования, отсчитываемого от исходного уровня (рис. 10.9). Длительность процесса установления в системе АРУ зависит от величины перепада амплитуды. Иногда задают значение tyy при максимальном перепаде амплитуд сигналов, равном динамическому диапазону (Оп = D), а чаще при малых перепадах, когда t/вх меняется всего в 2-3 раза {Da = 6... 10 дБ). Часто задают требования к форме переходной характеристики АРУ, ограничивая максимальный выброс б единицами процентов от стационарного значения. В отдельных случаях выбросы вообще недопустимы. Требования обеспечения малых искажений модулирующего сигнала и малой длительности переходного процесса противоречивы. Поэтому при проектировании систем, к которым одновременно предъявляются те и другие требования, необходимо найти разумный компромисс между ними. В расчет системы АРУ по заданным требованиям входит расчет стационарного и динамического режимов. В первом случае определяют необходимое число регулируемых каскадов Мр, напряжение задержки АРУ Us и коэффициент усиления цепи обратной связи /Сару. Во втором случае помимо этих параметров оценивают еще и постоянные времени фильтров цепи АРУ. Параметры, определенные в результате расчета стационарного режима, уточняются -исходя из условий устойчивости и переходного процесса. 10.2. РАСЧЕТ СТАЦИОНАРНОГО РЕЖИМА При расчете исходными данными являются: - динамический диапазон амплитуд входных сигналов, т е. величины и^х mm. max ИЛИ D = (/3, шах вх mln, - максимально допустимое изменение выходного напряжения вых max. - номинальное выходное напряжение приемника и^ых о- В качестве примера рассмотрим порядок расчета задержанной, усиленней системы АРУ с раздельным детектированием, так как этот наиболее общий случай охватывает системы как непрерывного действия, так и импульсные. Общее число Пр и параметры каскадов приемника, на которые можно подавать регулирующее напряжение, определяются выбранной схемой построения приемника. В радиоприемных устройствах регулировка усиления может производиться в УВЧ, УПЧ и УНЧ (ВУ), поэтому полное число каскадов, в которых можно регулировать усиление, оценивается полным числом каскадов перечисленных устройств. При расчете следует выбрать каскады приемника, на которые целесообразно и допустимо вводить регулировку усиления, и определить необходимый коэффициент усиления цепи обратной связи /Сару, при котором обеспечивается требуемое напряжение регулирования для этих каскадов. При этом необходимо помнить, что не во всех каскадах перечисленных устройств можно регулировать усиление. Чтобы избежать нелинейных искажений, регулировку усиления часто не вводят на смеситель, на выходные каскады УПЧ и УНЧ (ВУ). Кроме того, максимальное число регулируемых каскадов (Пр max) ограничено условиями эффективности регулировки и отсутствия больших нелинейных искажений модулирующего сигнала. Для уменьшения нелинейных искажений регулировкой усиления охватываются только те транзисторные каскады, амплитуды [/бэ сигналов на базе которых значительно меньше уровня ограничения [/orpft, определенного по формуле (10.3) и пересчитанного к базе этих каскадов. Указанный пересчет для каскада с номером k можно осуществить, зная его коэффициент усиления К), t/orpft/(5...10) /С,. (10.14) Поделив заданную амплитуду напряжения на выходе приемника (усилителя) [/вых о на найденную величину [/бэ, находим коэффициент усиления выходных каскадов, которые не должны подвергаться регулированию Квых = вых о/БЭ. (40.15) Зная схему построения и параметры выходных каскадов приемника, по полученному коэффициенту Квы% легко определить число нерегулируемых выходных каскадов п^ых и максимальное число регулируемых каскадов Пр max = п - Пвых- Если все выходные каскады приемника одинаковы, то максимальное число регулируемых каскадов равно (lO.lfi) П , = n-lg/Cвыx/lg Кг где п - общее число каскадов приемника; /С)вых - коэффициент усиления одного выходного каскада (полученное по формуле число округляется до меньшего целого). Эффективность работы АРУ в значительной степени зависит от выбранного способа регулирования усиления. В транзисторных усилителях применяются следующие способы регулировок: 1) изменение режима работы транзистора по постоянному току (рис. 10.10, а); 2) изменение глубины отрицательной обратной связи (рис, 10.10, б); 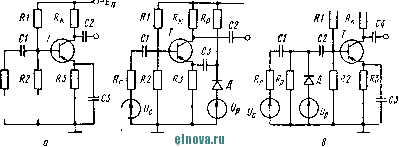 Рис. 10.10. Примеры схем каскадов с регулировкой режима по постоянному току (а), изменением глубины отрицательной обратной связи (б) и регулируемым аттенюатором (в). 3) изменение коэффициента передачи регулируемых аттенюаторов регулирующим напряжением (рис. 10.10, е). Первый способ является простейшим и его часто используют на практике. Недостаток его заключается в том, что при больших напряжениях регулирования Up в каскаде наблюдаются нелинейные искажения. Линейность амплитудной характеристики транзисторного каскада, использующего второй способ регулировки, наоборот, возрастает при увеличении регулирующего напряжения, однако эти каскады сложнее в наладке и эксплуатации и применяются сравнительно редко. Введением большого числа регулируемых аттенюато- юв можно обеспечить значительный диапазон регулирования. (роме того, регулируемые аттенюаторы можно использовать и в сочетании с регулируемыми транзисторными каскадами, но при включении регулируемого аттенюатора уменьшается начальный коэффициент усиления усилителя. Расчет регулируемых каскадов практически ничем не отличается от расчета линейных каскадов УПЧ и УВЧ (см. гл. 6). В результате этих расчетов определяются: максимальный коэффициент усиления Ктах регулируемого каскада, соответствующий исключению управляющего элемента из схемы (для управляемого транзистора Ктах = iPol. где IPol - модуль коэффициентз усиления транзистора по току в схеме с ОЭ); номинальный коэффициент усиления /Со1 регулируемого каскада (при (7р = 0); начальный (при Up = 0) коэффициент усиления Кор приемника (усилителя). Приближенное уравнение регулировочной характеристики усилителя с Пр регулируемыми каскадами в неявной форме можно записать в следующем виде [6, 7]: [ - ( J-l] Ктах f Кор \ Пр J Kol \ Кр / - ф^ШХ /(с (10.17) для схем на рис. 10.10, а, б; г 1 к max Uo К Koi max к p -1 (10.18) для схемы на рис. 10.10, в, где Uq, Uo - номинальные напряжения на управляемых р - -переходах, определяемые выбранным исходным режимом работы управляемых транзисторов и диодов; ф - температурный потенциал управляемого перехода (при комнатной температуре ф^ 0,025 В). Номинальное напряжение между базой и эмиттером регулируемого транзистора (рис. 10.10, а) выбирается в соответствии со справочными данными в пределах 0,2-0,8 В. Исходное напряжение и о на диоде в цепи обратной связи (рис. 10.10, б) устанавливают на экспоненциальном участке вольт-амперной характеристики {Uo О, 1... 1 В), выбирая сопротивление резистора цепи регулировки Rp, подсоединенного к источнику питания Еа, из условия Rp {Еа - UoVIoj (10.19) где /од-начальный ток диода, соответствующий выбранному напряжению Uo (оценивается по вольт-амперной характеристике диода). В регулируемом аттенюаторе в исходном состоянии напряжение на диод не подается. Регулирующее напряжение, выделяемое на диоде, должно меняться в пределах экспоненциального участка вольт-амперной характеристики {Uo = 0,1...! В) диода. Сопротивление Rp следует подобрать так, чтобы большая часть регулирующего напряжения выделялась на диоде, в то же время оно не должно заметно шунтировать нагрузку предыдущего каскада Ra- (10.20) Rp = UoRj.. 1 ... 17 18 19 20 21 22 23 ... 25 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||